WOLFRAM SYSTEM MODELER
FiltersExample of a hydraulic system using filters |
|
Diagram
Wolfram Language
In[1]:=
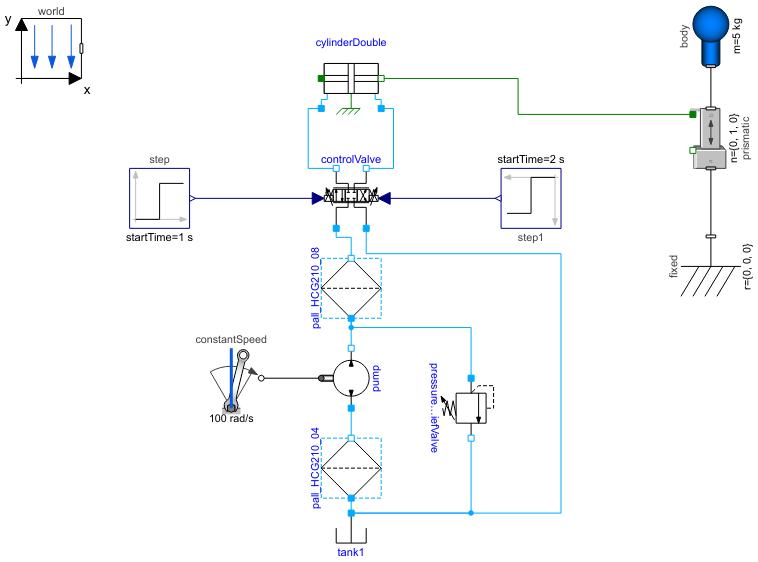
SystemModel["Hydraulic.Examples.Filter.Filters"]
Out[1]:=
Information
This example model shows how a hydraulic system can work with filters. The oil is filtered in two places, from the tank to the pump and from the pump to the control valve. At time t = 1, the control valve opens up for flow from the pump, and the body will be pushed upwards At time t = 2, the control valve closes again, and the body will stop moving.
Fig. 1 shows how the pressure and mass flow in the filter changes. Fig. 2 shows how the system moves a load. Fig. 3 shows the pressure in the double cylinder.
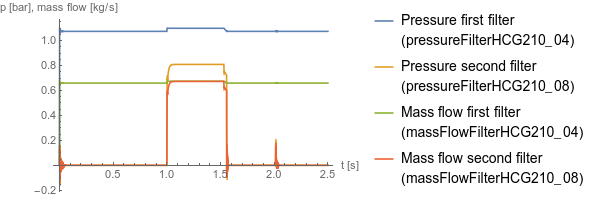
Fig. 1 Filters pressure and mass flow
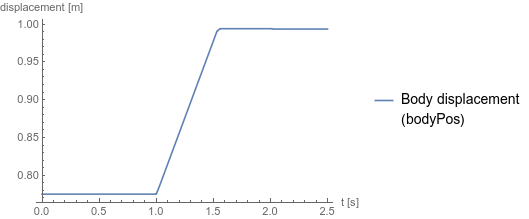
Fig. 2 Body position
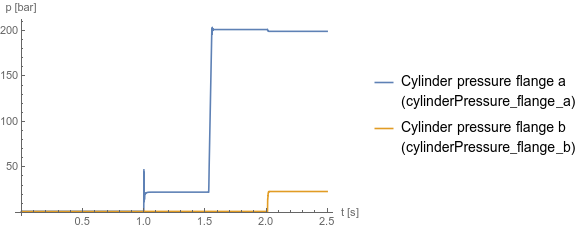
Fig. 3 Double cylinder pressure
Fig. 1 shows how the pressure and mass flow in the filter changes. Fig. 2 shows how the system moves a load. Fig. 3 shows the pressure in the double cylinder.
Fig. 1 Filters pressure and mass flow
Fig. 2 Body position
Fig. 3 Double cylinder pressure
Parameters (2)
Components (15)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| cylinderDouble |
Type: CylinderDouble Description: Double cylinder model |
|
| constantSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| controlValve |
Type: PCVE43ClosedCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| pall_HCG210_08 |
Type: Pall_HCG210_08 Description: High Pressure Filter length code 08 |
|
| prismatic |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| step |
Type: Step Description: Generate step signal of type Real |
|
| step1 |
Type: Step Description: Generate step signal of type Real |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| body |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| pall_HCG210_04 |
Type: Pall_HCG210_04 Description: High Pressure Filter length code 04 |