WOLFRAM SYSTEM MODELER
HydraulicHydraulic library developed by Wolfram MathCore AB |
|
Package Contents
|
A step-by-step guide to building your first model with Hydraulic |
|
|
Package with example models of hydraulic systems |
|
|
Package with different types of valves |
|
|
Package with models of different types of cylinders |
|
|
Package with pump and motor models for hydraulic liquids |
|
|
Package with tanks and volumes |
|
|
Package with laminar and turbulent restriction models |
|
|
Package with filter models |
|
|
Package with pressure and flow sensors |
|
|
Package with media properties |
|
|
Package with connectors and partial models |
|
|
Package with spools and friction that are used in the other models |
|
|
Package with Hydraulic specific type specifications |
|
|
Package with a collection of icons used in hydraulic components |
Library Units and Quantities
| Units | All units available in Hydraulic |
|---|---|
| Quantities | All quantities available in Hydraulic |
Information
This hydraulic library contains components for modeling hydraulic systems. Some of the components could be connected to other components in other Modelica libraries. The pumps and motors can be connected to rotational mechanical components from the Modelica Standard Library. The cylinders can be connected to translational mechanical components from the Modelica Standard Library. Many other models, for example the proportional valves, can be connected to blocks from the Modelica Standard Library. The component icons are painted according to the DIN ISO 1219 standard.
Most of the components in this library have lumped volumes to make it possible to connect them arbitrarily. They are referred to as dynamic components. A dynamic component is normally built up using static components and volumes. The static components are normally modeled inside the dynamic components since they should not be used outside the component. The added advantage is that a dynamic component can be connected almost arbitrarily. Note however that some combinations and circuits are not physically relevant and should therefore be avoided.
All the static models have a dotted frame to make it easy to identify them. The figures below show the icons for the dynamic and static version of a valve.
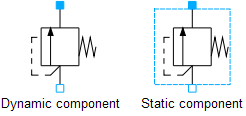
The dotted frame is used for the static models
Default parameter values
Default parameter values represent a typical mobile hydraulic system: DN12 (1/2") piping, ISO 3320 50/25 cylinder (50 mm bore, 25 mm rod), NG6–NG10 valves. Working pressure defaults correspond to 200 bar. Diameters are displayed in millimeters, pressures in bar.Package structure
For a quick overview of the different packages in this library, go to the top.Most of the components in this library have lumped volumes to make it possible to connect them arbitrarily. They are referred to as dynamic components. A dynamic component is normally built up using static components and volumes. The static components are normally modeled inside the dynamic components since they should not be used outside the component. The added advantage is that a dynamic component can be connected almost arbitrarily. Note however that some combinations and circuits are not physically relevant and should therefore be avoided.
All the static models have a dotted frame to make it easy to identify them. The figures below show the icons for the dynamic and static version of a valve.
The dotted frame is used for the static models
Ports
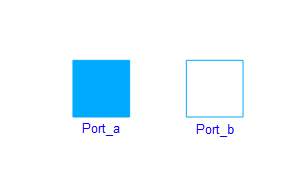
The connectors in this library are defined in the Interfaces package. The ports have a pressure variable p in [Pa] and a flow variable mdot in [kg/s], defined positive into the component. There are two types of ports in this library, Port_a and Port_b. The only difference between them is the icons.
Limitations
No cavitation and temperature effects have been modeled. Bulk modulus is assumed to be constant when fluid compressibility is modeled.Examples
In the Examples package, there are examples of how to use the components in the library to build hydraulic systems.References
- K. Gieck and R. Gieck, Engineering Formulas, 7th ed., Germering, Germany: Gieck Publishing, 1997.
- C. Nordling and J. Österman, Physics Handbook for Science and Engineering, 7th ed., Lund, Sweden: Studentlitteratur, 2004.
- W. Borutzky, B. Barnard, and J. Thoma, "An Orifice Flow Model for Laminar and Turbulent Conditions", Simulation Modelling Practice and Theory, 10(3-4), 2002 pp. 141-152. doi: 10.1016/S1569-190 X (02) 00092-8.
- F. Young, R. Munson, H. Okiishi, and W. Huebsch, A Brief Introduction to Fluid Mechanics, 4th ed., Hoboken, NJ: Wiley, 2007.
- J. Nikuradse, "Gesetzmässigkeiten der turbulenten Stromung in glatten Rohren", Forschung auf dem Gebiet des Ingenieurwesens A, 4(1), 1933 p. 44. doi: 10.1007/BF02716946.
- J. Nikuradse, "Strömungsgesetze in rauhen Rohren", in Forschungsheft, Vol. 361, Berlin: VDI Verlag, 1933.
- Industrial Hydraulics Manual, 5th ed., Maumee, OH: Eaton Hydraulics Training Services, 2008.
Wolfram Language
In[1]:=
SystemModel["Hydraulic"]
Out[1]:=
Revisions
New in Version 2.1
- Added smoothing to the controlled orifice for improved numerical robustness
- Replaced mass with hard stops (MassWithStopAndFriction) by a mass with two ElastoGaps for smoother, more realistic contact dynamics
New in Version 2.0
- Library compatible with Modelica Standard Library 4.0.0
New in Version 1.3.1
- Modelica language compatibility fixes
- Minor fixes to units
- Minor documentation fixes
- Use icon style matching other Wolfram libraries
New in Version 1.3
- Library is now available for free for Wolfram System Modeler users
- Minor documentation fixes
New in Version 1.2.2
- Modelica language compatibility fixes
- Minor bug fixes in example models
New in Version 1.2.1
- Now compatible with Modelica library version 3.2.3
New in Version 1.2
- Added stored plots to examples for easy plotting of relevant variables
- Improved initialization
- Now compatible with Modelica library version 3.2.2
New in Version 1.1
- New filter models
- Improved double cylinder component