WOLFRAM SYSTEM MODELER
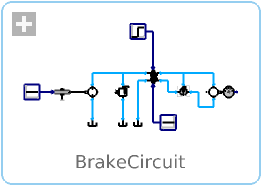
BrakeCircuitExample circuit with a brake valve |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.Rotation.BrakeCircuit"]
Out[1]:=
Information
This model shows an example of how a brake valve can be used in a hydrostatic transmission. The brake valve closes when the pressure drops on its pilot port. This allows pressure to build up on the motor outlet, which causes it to slow down faster.
Fig. 1 shows how the motor initially accelerates and then stops. Fig. 2 shows how the brake valve closes when the motor is brought to a halt. Fgi. 3 shows how the pressure at the motor outlet is kept high as long as the motor is rotating and the brake valve is closed.
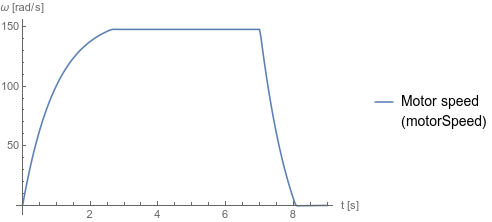
Fig. 1 Motor speed
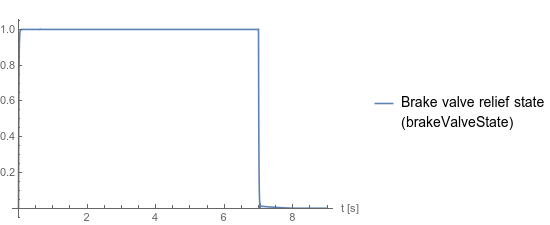
Fig. 2 Brake valve opening state
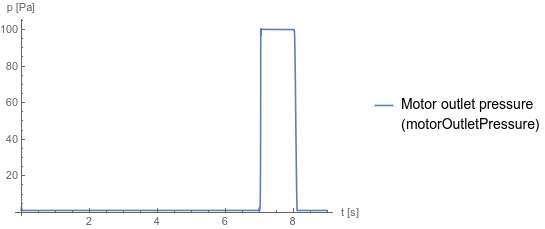
Fig. 3 Pressure on motor outlet
Fig. 1 shows how the motor initially accelerates and then stops. Fig. 2 shows how the brake valve closes when the motor is brought to a halt. Fgi. 3 shows how the pressure at the motor outlet is kept high as long as the motor is rotating and the brake valve is closed.
Fig. 1 Motor speed
Fig. 2 Brake valve opening state
Fig. 3 Pressure on motor outlet
Reference
Industrial Hydraulics Manual, 5th ed., Maumee, OH: Eaton Hydraulics Training Services, 2008 p. 294.Parameters (1)
| medium |
Value: Oil() Type: Medium Description: Medium in the component |
|---|
Components (14)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| controlValve |
Type: PCVE43OpenCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| motor |
Type: Motor Description: Model of a motor with fixed displacement and volumes |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| brakeValve |
Type: BrakeValve Description: Brake valve, allowing flow in one direction. The pilot port can be used to allow flow in the other direction. |
|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| speed |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| constSpeedCmd |
Type: Constant Description: Generate constant signal of type Real |
|
| const1 |
Type: Constant Description: Generate constant signal of type Real |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| stepBrake |
Type: Step Description: Generate step signal of type Real |