WOLFRAM SYSTEM MODELER
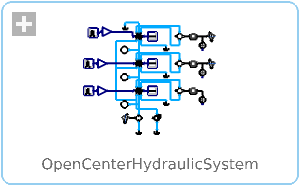
OpenCenterHydraulicSystemExample circuit with a pump that unloads to a reservoir when inactive |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.Rotation.OpenCenterHydraulicSystem"]
Out[1]:=
Information
This example shows three motors that are driven by a pump. Each motor has a different load. The open center valves direct pump flow to a reservoir when no motors are running. This means that the pump will not have to run constantly at the relief valve setting.
Fig. 1 shows how the three control valves are opened and then closed one after another. Fig. 2 shows how the motors start to spin and then stop when the corresponding valve is opened and closed. Fig. 3 shows how the open center design succeeds in reducing pump torque when no motor is used.
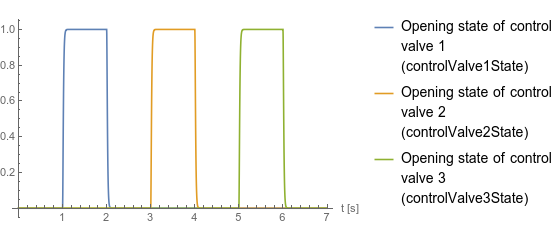
Fig. 1 Control valve opening states
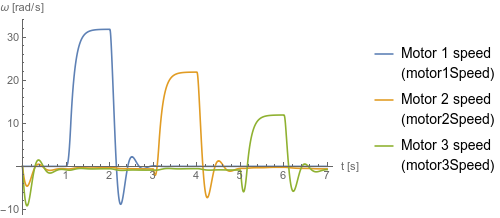
Fig. 2 Motor speeds
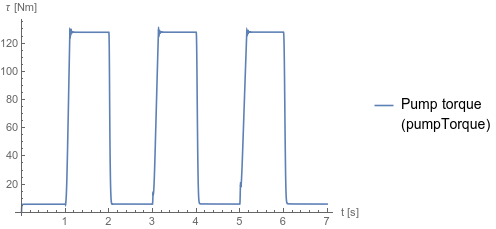
Fig. 3 Pump torque
Fig. 1 shows how the three control valves are opened and then closed one after another. Fig. 2 shows how the motors start to spin and then stop when the corresponding valve is opened and closed. Fig. 3 shows how the open center design succeeds in reducing pump torque when no motor is used.
Fig. 1 Control valve opening states
Fig. 2 Motor speeds
Fig. 3 Pump torque
Parameters (4)
| medium |
Value: Oil() Type: Medium Description: Medium in the component |
|---|---|
| dSpool |
Value: 0.001 Type: Length (m) Description: Spool diameter |
| LSpool |
Value: 0.01 Type: Length (m) Description: Spool stroke |
| wSpool |
Value: 100 Type: AngularVelocity (rad/s) Description: Spool natural angular frequency |
Components (36)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| tank5 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank6 |
Type: Tank Description: Simple tank with constant pressure |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| volume1 |
Type: Volume Description: Fixed volume with fluid storage |
|
| constantSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| controlValve2 |
Type: PCVE63 Description: Electrically actuated proportional control valve with six ports and three states |
|
| const2 |
Type: Constant Description: Generate constant signal of type Real |
|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| const3 |
Type: Constant Description: Generate constant signal of type Real |
|
| controlValve3 |
Type: PCVE63 Description: Electrically actuated proportional control valve with six ports and three states |
|
| const1 |
Type: Constant Description: Generate constant signal of type Real |
|
| controlValve1 |
Type: PCVE63 Description: Electrically actuated proportional control valve with six ports and three states |
|
| volume2 |
Type: Volume Description: Fixed volume with fluid storage |
|
| volume3 |
Type: Volume Description: Fixed volume with fluid storage |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank4 |
Type: Tank Description: Simple tank with constant pressure |
|
| motor1 |
Type: Motor Description: Model of a motor with fixed displacement and volumes |
|
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| speedSensor1 |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| speedSensor2 |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| motor2 |
Type: Motor Description: Model of a motor with fixed displacement and volumes |
|
| speedSensor3 |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| inertia3 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| motor3 |
Type: Motor Description: Model of a motor with fixed displacement and volumes |
|
| singlePulse1 |
Type: SinglePulse Description: Model that generates a single pulse signal of type Real |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| gain2 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| singlePulse2 |
Type: SinglePulse Description: Model that generates a single pulse signal of type Real |
|
| singlePulse3 |
Type: SinglePulse Description: Model that generates a single pulse signal of type Real |
|
| gain3 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| constantTorque3 |
Type: ConstantTorque Description: Constant torque, not dependent on speed |
|
| constantTorque2 |
Type: ConstantTorque Description: Constant torque, not dependent on speed |