WOLFRAM SYSTEM MODELER
Servo2Example circuit of a cylinder moving a load with the help of a simple controller |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.Translation.Servo2"]
Out[1]:=
Information
This example model shows how to move a load with a cylinder. The directional control valve is used to connect the cylinder ends with either the pump or tank depending on the command. A simple controller moves the mass to 0.5 m, then to 0.75 m. The pressure relief valve limits system pressure by opening when the pressure has reached a certain threshold.
Fig. 2 shows how the control valve initially is pulled to the left state, centered, pushed to the right state then back to the left state, and finally slowly centered again. Fig. 2 shows how the pressure at the cylinder's right port builds up when the control valve is in the left state and how the pressure at the cylinder's left port is built up when the control valve is in the right state. Fig. 3 shows the desired cylinder position and the actual cylinder position. Notice how the cylinder moves when the control valve is in its left or right states.
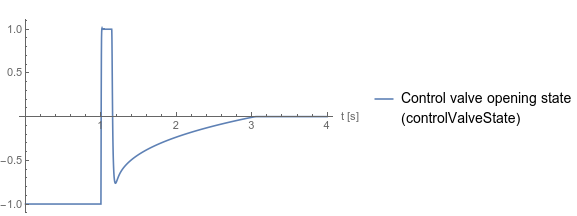
Fig. 1 Control valve opening state, -1 is the left state and +1 is right state
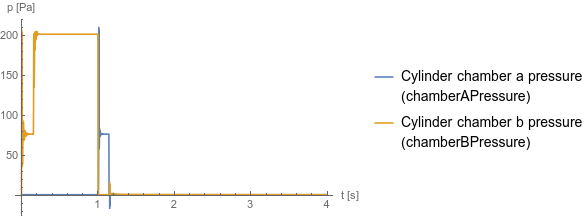
Fig. 2 Cylinder chamber pressures
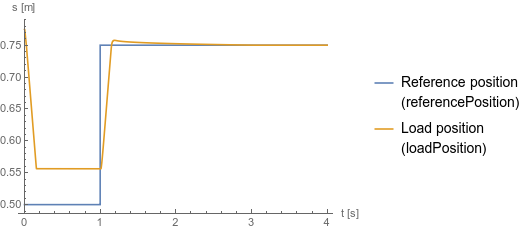
Fig. 3 Reference position and load position
Fig. 2 shows how the control valve initially is pulled to the left state, centered, pushed to the right state then back to the left state, and finally slowly centered again. Fig. 2 shows how the pressure at the cylinder's right port builds up when the control valve is in the left state and how the pressure at the cylinder's left port is built up when the control valve is in the right state. Fig. 3 shows the desired cylinder position and the actual cylinder position. Notice how the cylinder moves when the control valve is in its left or right states.
Fig. 1 Control valve opening state, -1 is the left state and +1 is right state
Fig. 2 Cylinder chamber pressures
Fig. 3 Reference position and load position
Parameters (2)
Components (16)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| mass |
Type: Mass Description: Sliding mass with inertia |
|
| positionSensor |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| cylinderDouble |
Type: CylinderDouble Description: Double cylinder model |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| constantSpeed1 |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| controlValve |
Type: PCVE43TandemCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| startStep |
Type: Step Description: Generate step signal of type Real |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| pressureSensor |
Type: PressureSensor Description: Sensor measuring absolute pressure |