WOLFRAM SYSTEM MODELER
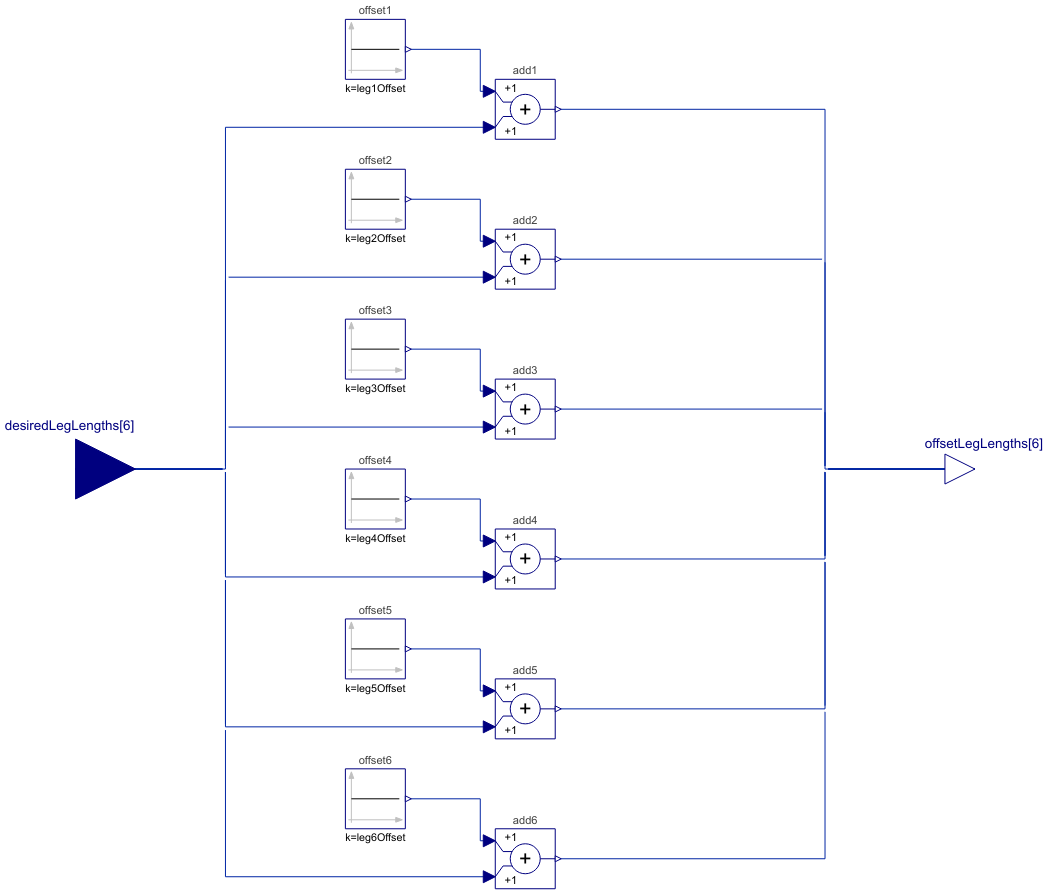
LegOffsetsBlock adding fixed offsets to control signals for lengths of six legs |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.IndustrialManufacturing.StewartPlatform.Components.LegOffsets"]
Out[1]:=
Information
This component models systematic errors in the lengths of the legs of a Stewart platform by adding a fixed offset to the control signal of each leg.
Parameters (6)
Connectors (2)
| desiredLegLengths |
Type: RealInput[6] Description: 'input Real' as connector |
|
|---|---|---|
| offsetLegLengths |
Type: RealOutput[6] Description: 'output Real' as connector |
Components (12)
| add1 |
Type: Add Description: Output the sum of the two inputs |
|
|---|---|---|
| offset1 |
Type: Constant Description: Generate constant signal of type Real |
|
| offset2 |
Type: Constant Description: Generate constant signal of type Real |
|
| add2 |
Type: Add Description: Output the sum of the two inputs |
|
| add3 |
Type: Add Description: Output the sum of the two inputs |
|
| offset3 |
Type: Constant Description: Generate constant signal of type Real |
|
| offset4 |
Type: Constant Description: Generate constant signal of type Real |
|
| add4 |
Type: Add Description: Output the sum of the two inputs |
|
| add5 |
Type: Add Description: Output the sum of the two inputs |
|
| offset5 |
Type: Constant Description: Generate constant signal of type Real |
|
| offset6 |
Type: Constant Description: Generate constant signal of type Real |
|
| add6 |
Type: Add Description: Output the sum of the two inputs |
Used in Examples (1)
|
StewartPlatformControlScenario IndustryExamples.IndustrialManufacturing.StewartPlatform Model of six-degree-of-freedom Stewart platform whose position is controlled by position setpoints. |