WOLFRAM SYSTEM MODELER
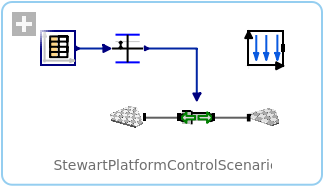
StewartPlatformControlScenarioModel of six-degree-of-freedom Stewart platform whose position is controlled by position setpoints. |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["IndustryExamples.IndustrialManufacturing.StewartPlatform.StewartPlatformControlScenario"]
Out[1]:=
Information
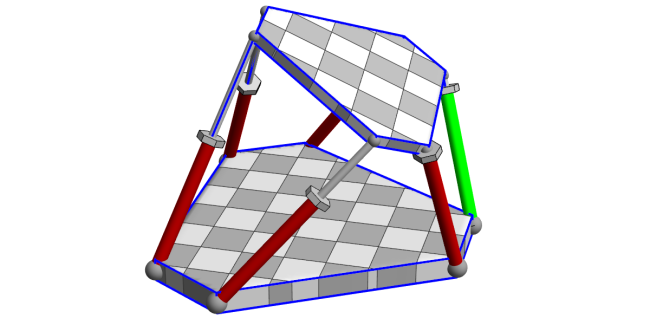
This model simulates a six-degree-of-freedom Stewart platform. The position and orientation of the platform is determined by the lengths of six legs. Each leg comprises a linear actuator and five rotational degrees of freedom. The model is constructed from components in the Modelica.Mechanics library. The Wolfram Language is used to plan the 3D geometry of the model, and to produce custom visualizations of simulation results.
Simulation & Animation
To simulate the model and view a 3D animation of it, follow the steps below:
Click the Simulate button: 
Click the Animation button: 
Use your mouse or trackpad to drag the animation to a good angle and zoom in with your scroll wheel or by using the trackpad. Then click the Play button: 
The automatically generated animation shows the Stewart platform following a prescribed test trajectory:
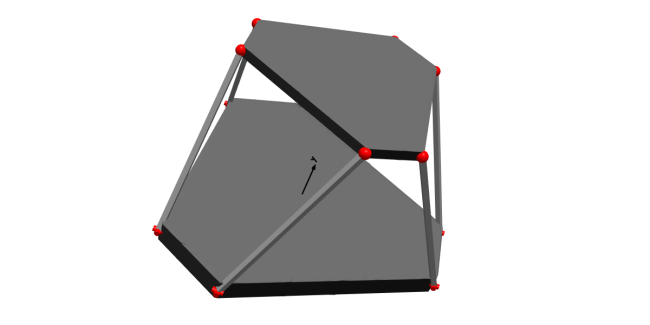
See below for more advanced custom visualizations.
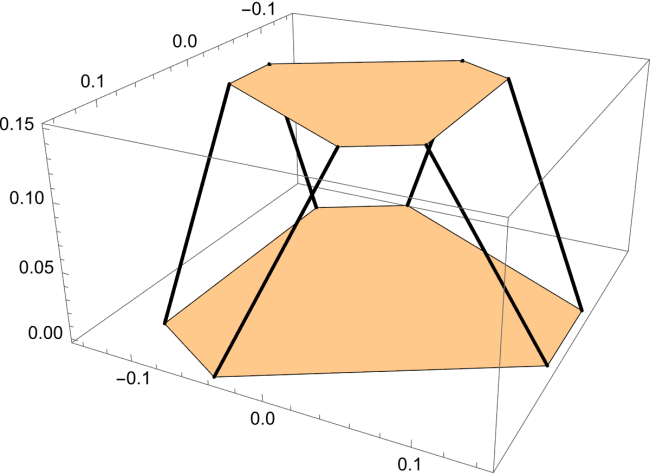
Design: 3D Geometry
Use the Wolfram Language to plan the 3D geometry of the Stewart platform and solve the inverse kinematics problem to plan the motion of the platform:
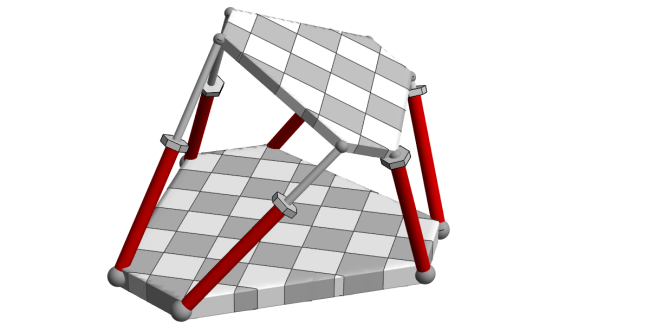
Visualization: Custom 3D Animation
Build up a custom 3D visualization of the Stewart platform using the Wolfram Language and export an AVI movie:
Visualization: Leg Length Offset
Use the Wolfram Language to create a custom visualization of the effect of a small offset in a single leg:
In order to get the full experience of this example, you need a desktop Wolfram Language product. A free trial download is available at www.wolfram.com/mathematica/trial/
For the full example, open the accompanying notebook StewartPlatform.nb.
Components (6)
| platform |
Type: Platform Description: Hexagonal six-degree-of-freedom surface of Stewart platform |
|
|---|---|---|
| base |
Type: Base Description: Hexagonal fixed base of Stewart platform |
|
| legs |
Type: Legs Description: Set of six actuated six-degree-of-freedom legs |
|
| legLengths |
Type: CombiTimeTable Description: Table look-up with respect to time and various interpolation and extrapolation methods (data from matrix/file) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| legOffsets |
Type: LegOffsets Description: Block adding fixed offsets to control signals for lengths of six legs |