WOLFRAM SYSTEM MODELER
BaseHexagonal fixed base of Stewart platform |
|
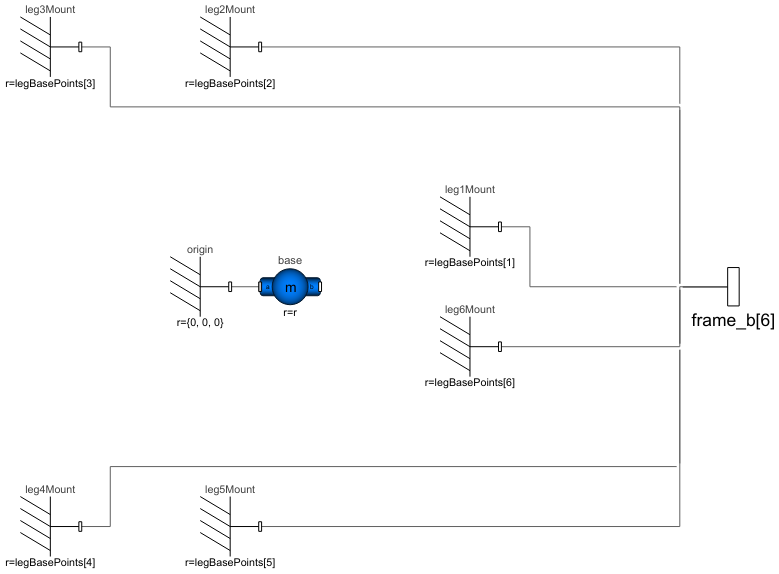
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.IndustrialManufacturing.StewartPlatform.Components.Base"]
Out[1]:=
Information
This component models the hexagonal fixed base of a Stewart platform.
Parameters (1)
| legBasePoints |
Value: {{0.14488887394336, 0, 0.0388228567653781}, {-0.0388228567653781, 0, 0.14488887394336}, {-0.106066017177982, 0, 0.106066017177982}, {-0.106066017177982, 0, -0.106066017177982}, {-0.0388228567653781, 0, -0.14488887394336}, {0.14488887394336, 0, -0.0388228567653781}} Type: Real[6,3] |
|---|
Connectors (1)
| frame_b |
Type: Frame_b[6] Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|---|
Components (8)
| leg1Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
|---|---|---|
| leg2Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| leg3Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| leg4Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| leg5Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| leg6Mount |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| origin |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| base |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
Used in Examples (1)
|
StewartPlatformControlScenario IndustryExamples.IndustrialManufacturing.StewartPlatform Model of six-degree-of-freedom Stewart platform whose position is controlled by position setpoints. |