WOLFRAM SYSTEM MODELER
LegsSet of six actuated six-degree-of-freedom legs |
|
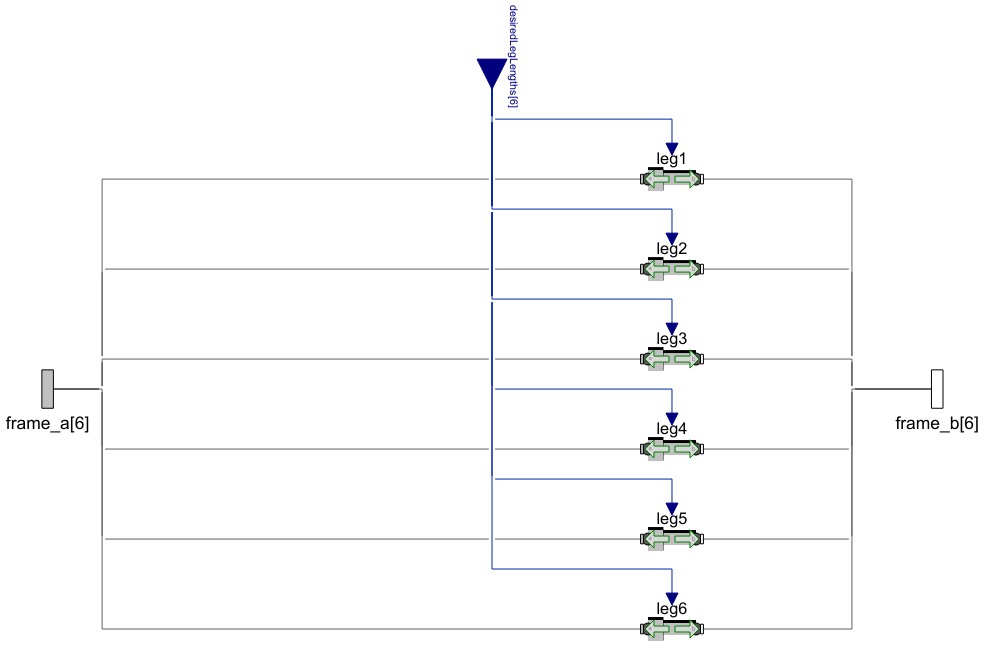
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.IndustrialManufacturing.StewartPlatform.Components.Legs"]
Out[1]:=
Information
This component models a set of six six-degree-of-freedom legs with controlled lengths determined by an array of six control signals.
Parameters (3)
| initialLengths |
Value: {0.170350338674353, 0.170350338674353, 0.170350338674353, 0.170350338674353, 0.170350338674353, 0.170350338674353} Type: Length[6] (m) |
|---|---|
| legDirections |
Value: {{-0.435444956563936, 0.880538313966868, 0.187189656336606}, {0.379833475995148, 0.880538313966868, -0.283511566165877}, {0.0556114805687882, 0.880538313966868, -0.470701222502483}, {0.0556114805687882, 0.880538313966868, 0.470701222502483}, {0.379833475995148, 0.880538313966868, 0.283511566165877}, {-0.435444956563936, 0.880538313966868, -0.187189656336606}} Type: Real[6,3] |
| initialLengthsFixed |
Value: false Type: Boolean |
Connectors (3)
| desiredLegLengths |
Type: RealInput[6] Description: 'input Real' as connector |
|
|---|---|---|
| frame_b |
Type: Frame_b[6] Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_a |
Type: Frame_a[6] Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
Components (6)
| leg1 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
|
|---|---|---|
| leg2 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
|
| leg3 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
|
| leg4 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
|
| leg5 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
|
| leg6 |
Type: SixDOFLeg Description: Six-degree-of-freedom leg with controlled length |
Used in Examples (1)
|
StewartPlatformControlScenario IndustryExamples.IndustrialManufacturing.StewartPlatform Model of six-degree-of-freedom Stewart platform whose position is controlled by position setpoints. |