WOLFRAM SYSTEMMODELER
InvertedPendulumA controlled inverted pendulum system |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["IntroductoryExamples.Systems.InvertedPendulum"]
Out[1]:=
Information
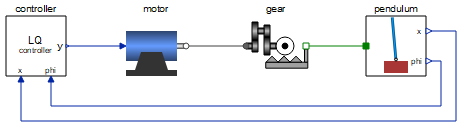
The pendulum system consists of an electrical motor, a gear, and a pendulum connected to a cart. The position of the cart is controlled using a controller with LQ (Linear Quadratic) design. The first priority of the controller is to make sure that the pendulum stays in an upright position.
Simulate the system for 20 seconds and view the result in an animation window. The figure below shows an animation at time 11.3 seconds using the pulse reference signal (referenceType=2):
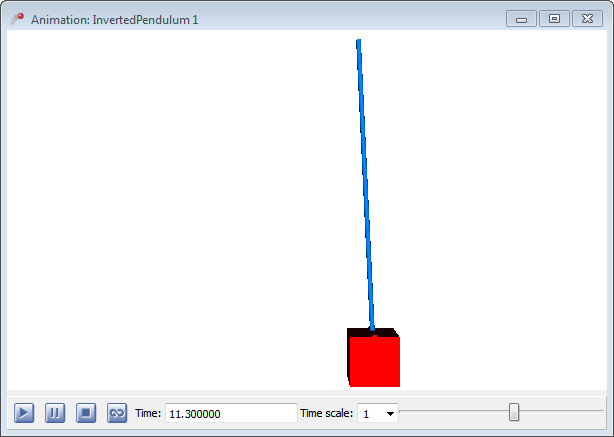
The position of the cart can be changed by the referenceType parameter. With the time table option (referenceType=3) you can create your own arbitrary signal. Change different parameters of the system, e.g., limit the maximum output signal from the controller (controller.uMax), length of pendulum (pendulum.l_pendulum) and see what happens.
For a step by step tutorial see System—Inverted Pendulum.
Parameters (1)
| referenceType |
Value: 2 Type: Integer Description: Type of reference signal: 1=step, 2=pulse, 3=time table |
|---|
Components (4)
| motor |
Type: ElectricalMotor Description: |
|
|---|---|---|
| controller |
Type: LQControlSystem Description: |
|
| pendulum |
Type: Pendulum Description: |
|
| gear |
Type: GearBox Description: |