WOLFRAM SYSTEMMODELER
PendulumAn inverted pendulum connected to a cart |
|
Diagram

Wolfram Language
In[1]:=

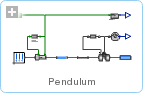
SystemModel["IntroductoryExamples.Systems.Components.Pendulum"]
Out[1]:=
Information
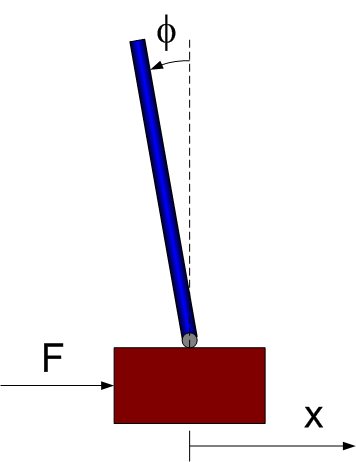
This pendulum system consists of a cart with a joint connected to the pendulum. Components from the MultiBody library have been used for the cart and pendulum and components from the translational and rotational mechanical library have been used to model friction. The cart can only be moved in a fixed horizontal motion.
To be able to control the pendulum, the position of the cart, x, and the pendulum angle, phi, is measured. The movement of the cart can be controlled via a force, F, using the flange input.
Connectors (3)
| flange_a |
Type: Flange_a Description: |
|
|---|---|---|
| position |
Type: RealOutput Description: |
|
| angle |
Type: RealOutput Description: |
Parameters (9)
| l_pendulum |
Value: 0.61 Type: Length (m) Description: Pendulum length |
|---|---|
| r_pendulum |
Value: 0.005 Type: Radius (m) Description: Pendulum diameter |
| d_pendulum |
Value: 0.01 Type: RotationalDampingConstant (N·m·s/rad) Description: Pendulum damper constant |
| rho_pendulum |
Value: 7700 Type: Density (kg/m³) Description: Pendulum material density |
| d_slider |
Value: 2 Type: TranslationalDampingConstant (N·s/m) Description: Pendulum slider constant |
| rho_cart |
Value: 445 Type: Density (kg/m³) Description: Cart material density |
| l_cart |
Value: 0.1 Type: Length (m) Description: Cart length |
| h_cart |
Value: 0.1 Type: Height (m) Description: Cart height |
| w_cart |
Value: 0.1 Type: Length (m) Description: Cart width |
Components (10)
| cart |
Type: BodyBox Description: |
|
|---|---|---|
| pendulumCylinder |
Type: BodyCylinder Description: |
|
| pendulumJoint |
Type: Revolute Description: |
|
| toMidCart |
Type: FixedTranslation Description: |
|
| sliderConstraint |
Type: Prismatic Description: |
|
| pendulumDamper |
Type: Damper Description: |
|
| sliderDamper |
Type: Damper Description: |
|
| angleSensor |
Type: AngleSensor Description: |
|
| positionSensor |
Type: PositionSensor Description: |
|
| world |
Type: World Description: |
Used in Examples (1)
|
A controlled inverted pendulum system |