WOLFRAM SYSTEM MODELER
PositionControlledDCPMPosition controlled DC PM drive with H-bridge from battery |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Electrical.Machines.Examples.ControlledDCDrives.PositionControlledDCPM"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
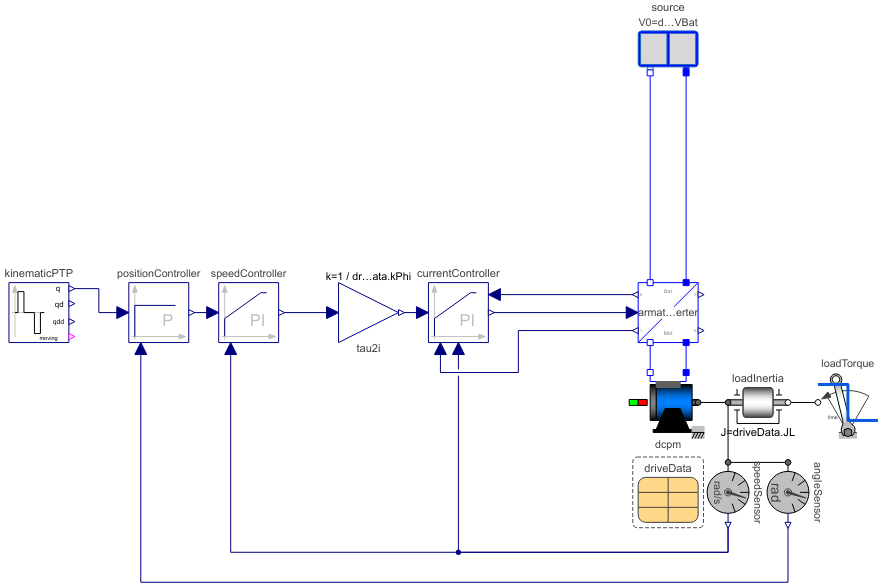
This model demonstrates how a position controller for a speed controlled DC PM drive works.
The inner current controller is parameterized according to the absolute optimum. The middle control loop is formed by the speed controller which is parameterized according to the symmetrical optimum. The outer control loop is formed by the position controller which is parameterized to avoid an overshot in the position.
At time=0.2 s the kinematicPTP starts to prescribe the reference position with limited speed and limited acceleration. At time=2.3 s a load torque step is applied, causing the drive to slightly leave the end position until the position controller brings the drive back to the desired position.
Further reading: Tutorial at the Modelica Conference 2017
Parameters (1)
| driveData |
Replaceable Component Type: DriveDataDCPM Description: DC machine data |
|---|
Components (15)
| driveData |
Type: DriveDataDCPM Description: DC machine data |
|
|---|---|---|
| loadInertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| dcpm |
Type: DC_PermanentMagnet Description: Permanent magnet DC machine |
|
| armatureInverter |
Type: DcdcInverter Description: DC-DC inverter |
|
| currentController |
Type: LimitedPI Description: Limited PI controller with anti-windup and feed-forward |
|
| tau2i |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| constantVoltage |
Type: ConstantVoltage Description: Source for constant voltage |
|
| resistor |
Type: Resistor Description: Ideal linear electrical resistor |
|
| ground |
Type: Ground Description: Ground node |
|
| loadTorque |
Type: TorqueStep Description: Constant torque, not dependent on speed |
|
| speedController |
Type: LimitedPI Description: Limited PI controller with anti-windup and feed-forward |
|
| positionController |
Type: LimitedPI Description: Limited PI controller with anti-windup and feed-forward |
|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| kinematicPTP |
Type: KinematicPTP2 Description: Move as fast as possible from start to end position within given kinematic constraints with output signals q, qd=der(q), qdd=der(qd) |