WOLFRAM SYSTEM MODELER
DQCurrentControllerCurrent controller in dq coordinate system |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Electrical.Machines.Utilities.DQCurrentController"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
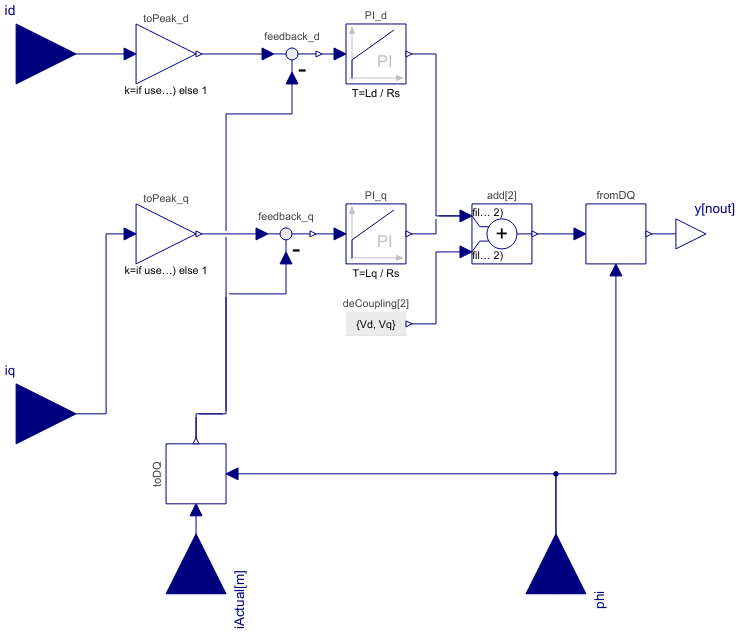
Simple Current controller
The desired d- and q-component of the space phasor current in rotor fixed coordinate system are given by inputs id and iq.
Using the given rotor position (input phi), the actual three-phase currents are measured and transformed to the d-q coordinate system.
Two PI controllers determine the necessary d- and q- voltages, which are transformed back to three-phase (output y[3]).
They can be used to feed a voltage source which in turn feeds a permanent magnet synchronous machine.
Inputs d and q can be given either as peak values (useRMS=false) or as RMS (useRMS=true).
The correction by factor √2 is done automatically.
The measured currents iActual[m] are assumed to be instantaneous values.
Note: No care is taken for current or voltage limiting, as well as for field weakening.
Parameters (10)
| p |
Type: Integer Description: Number of pole pairs |
|---|---|
| useRMS |
Value: true Type: Boolean Description: If true, inputs dq are multiplied by sqrt(2) |
| fsNominal |
Type: Frequency (Hz) Description: Nominal frequency |
| VsOpenCircuit |
Type: Voltage (V) Description: Open circuit RMS voltage per phase @ fsNominal |
| Rs |
Type: Resistance (Ω) Description: Stator resistance per phase |
| Ld |
Type: Inductance (H) Description: Inductance in d-axis |
| Lq |
Type: Inductance (H) Description: Inductance in q-axis |
| decoupling |
Value: false Type: Boolean Description: Use decoupling network |
| psiM |
Value: sqrt(2) * VsOpenCircuit / (2 * pi * fsNominal) Type: MagneticFlux (Wb) Description: Approximation of magnetic flux linkage |
| nout |
Value: m Type: Integer Description: Number of outputs |
Connectors (5)
| y |
Type: RealOutput[nout] Description: Connector of Real output signals |
|
|---|---|---|
| id |
Type: RealInput Description: Reference of d-current |
|
| iq |
Type: RealInput Description: Reference of q-current |
|
| phi |
Type: RealInput Description: Rotor angle |
|
| iActual |
Type: RealInput[m] Description: Measured three-phase currents |
Components (10)
| fromDQ |
Type: FromDQ Description: Transform rotor fixed space phasor to instantaneous stator quantities |
|
|---|---|---|
| toDQ |
Type: ToDQ Description: Transform instantaneous stator inputs to rotor fixed space phasor |
|
| toPeak_d |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| toPeak_q |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| feedback_d |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedback_q |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| PI_d |
Type: PI Description: Proportional-Integral controller |
|
| PI_q |
Type: PI Description: Proportional-Integral controller |
|
| add |
Type: Add[2] Description: Output the sum of the two inputs |
|
| deCoupling |
Type: RealExpression[2] Description: Set output signal to a time varying Real expression |
Used in Examples (2)
|
Modelica.Electrical.Machines.Examples.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by FOC |
|
|
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by FOC |