WOLFRAM SYSTEM MODELER
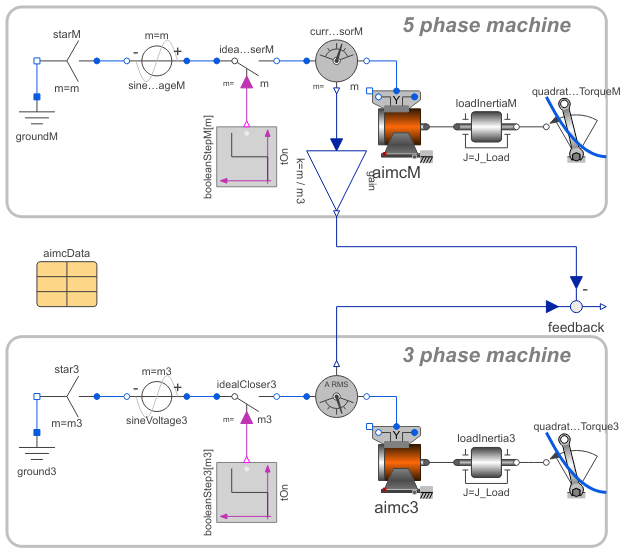
AIMC_DOL_MultiPhaseDirect on line start of multi phase asynchronous induction machine with squirrel cage |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.AIMC_DOL_MultiPhase"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
At start time tStart voltages are supplied to the multi phase asynchronous induction machines with squirrel cage. The machines starts from standstill, accelerating inertias against load torque quadratic dependent on speed, finally reaching nominal speed. Two equivalent machines with different numbers of phases are compared and their equal behavior is demonstrated.
Simulate for 1.5 seconds and plot (versus time):
aimcM|M3.tauElectrical: machine torqueaimsM/M3.wMechanical: machine speedfeedback.y: zero since difference of three phase current phasor and scaled multi phase current phasor are equal
Parameters (8)
| VsNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
|---|---|
| fNominal |
Value: aimcData.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| tOn |
Value: 0.1 Type: Time (s) Description: Start time of machine |
| T_Load |
Value: 161.4 Type: Torque (N·m) Description: Nominal load torque |
| w_Load |
Value: 1440.45 * 2 * Modelica.Constants.pi / 60 Type: AngularVelocity (rad/s) Description: Nominal load speed |
| J_Load |
Value: 0.29 Type: Inertia (kg·m²) Description: Load inertia |
| p |
Value: 2 Type: Integer Description: Number of pole pairs |
| aimcData |
Value: Type: AIM_SquirrelCageData |
Components (23)
| groundM |
Type: Ground |
|
|---|---|---|
| starM |
Type: Star |
|
| sineVoltageM |
Type: SineVoltage |
|
| idealCloserM |
Type: IdealClosingSwitch |
|
| booleanStepM |
Type: BooleanStep[m] |
|
| currentRMSsensorM |
Type: CurrentQuasiRMSSensor |
|
| terminalBoxM |
Type: TerminalBox |
|
| aimcM |
Type: AIM_SquirrelCage |
|
| loadInertiaM |
Type: Inertia |
|
| quadraticLoadTorqueM | ||
| aimcData |
Type: AIM_SquirrelCageData |
|
| ground3 |
Type: Ground |
|
| star3 |
Type: Star |
|
| sineVoltage3 |
Type: SineVoltage |
|
| idealCloser3 |
Type: IdealClosingSwitch |
|
| booleanStep3 |
Type: BooleanStep[m3] |
|
| currentRMSsensor3 |
Type: CurrentQuasiRMSSensor |
|
| terminalBox3 |
Type: TerminalBox |
|
| aimc3 |
Type: AIM_SquirrelCage |
|
| loadInertia3 |
Type: Inertia |
|
| quadraticLoadTorque3 | ||
| gain |
Type: Gain |
|
| feedback |
Type: Feedback |