WOLFRAM SYSTEM MODELER
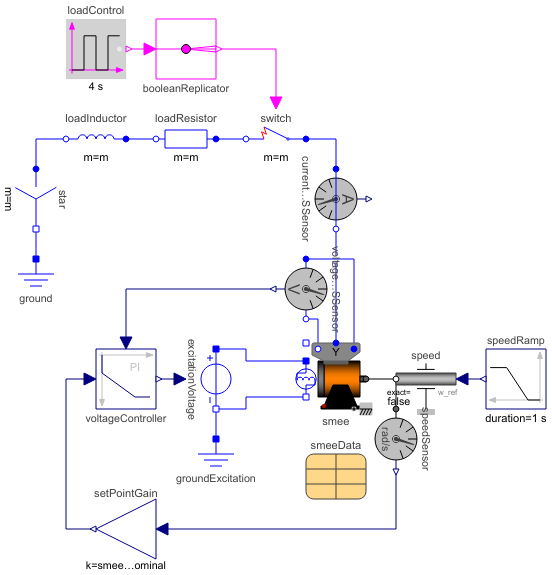
SMEE_LoadDumpTest example: ElectricalExcitedSynchronousMachine with voltage controller |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SynchronousMachines.SMEE_LoadDump"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
An electrically excited synchronous generator is started with a speed ramp, then driven with constant speed. Voltage is controlled, the set point depends on speed. After start-up the generator is loaded, the load is rejected.
Simulate for 10 seconds and plot:
- voltageQuasiRMSSensor.V
- smee.tauElectrical
- smee.ie
Default machine parameters are used
Parameters (9)
| wNominal |
Value: 2 * pi * smeeData.fsNominal / smee.p Type: AngularVelocity (rad/s) Description: Nominal speed |
|---|---|
| ZNominal |
Value: 3 * smeeData.VsNominal ^ 2 / smeeData.SNominal Type: Impedance (Ω) Description: Nominal load impedance |
| powerFactor |
Value: 0.8 Type: Real Description: Load power factor |
| RLoad |
Value: ZNominal * powerFactor Type: Resistance (Ω) Description: Load resistance |
| LLoad |
Value: ZNominal * sqrt(1 - powerFactor ^ 2) / (2 * pi * smeeData.fsNominal) Type: Inductance (H) Description: Load inductance |
| Ve0 |
Value: smee.IeOpenCircuit * Modelica.Electrical.Machines.Thermal.convertResistance(smee.Re, smee.TeRef, smee.alpha20e, smee.TeOperational) Type: Voltage (V) Description: No load excitation voltage |
| k |
Value: 2 * Ve0 / smeeData.VsNominal Type: Real Description: Voltage controller: gain |
| Ti |
Value: smeeData.Td0Transient / 2 Type: Time (s) Description: Voltage controller: integral time constant |
| smeeData |
Type: SynchronousMachineData Description: Synchronous machine data |
Outputs (1)
| controlError |
Default Value: (setPointGain.y - voltageQuasiRMSSensor.V) / smeeData.VsNominal Type: Real |
|---|
Components (19)
| smee |
Type: SM_ElectricalExcited Description: Electrical excited synchronous machine with optional damper cage |
|
|---|---|---|
| smeeData |
Type: SynchronousMachineData Description: Synchronous machine data |
|
| terminalBox |
Type: TerminalBox Description: Terminal box Y/D-connection |
|
| ground |
Type: Ground Description: Ground node |
|
| speed |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| speedRamp |
Type: Ramp Description: Generate ramp signal |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| setPointGain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| voltageQuasiRMSSensor |
Type: VoltageQuasiRMSSensor Description: Length of space phasor -> RMS voltage |
|
| voltageController |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| excitationVoltage |
Type: SignalVoltage Description: Generic voltage source using the input signal as source voltage |
|
| groundExcitation |
Type: Ground Description: Ground node |
|
| currentQuasiRMSSensor |
Type: CurrentQuasiRMSSensor Description: Length of space phasor -> RMS current |
|
| loadControl |
Type: BooleanPulse Description: Generate pulse signal of type Boolean |
|
| switch |
Type: CloserWithArc Description: Polyphase closer with arc |
|
| loadResistor |
Type: Resistor Description: Ideal linear electrical resistors |
|
| loadInductor |
Type: Inductor Description: Ideal linear electrical inductors |
|
| star |
Type: Star Description: Star-connection |
|
| booleanReplicator |
Type: BooleanReplicator Description: Boolean signal replicator |