WOLFRAM SYSTEM MODELER
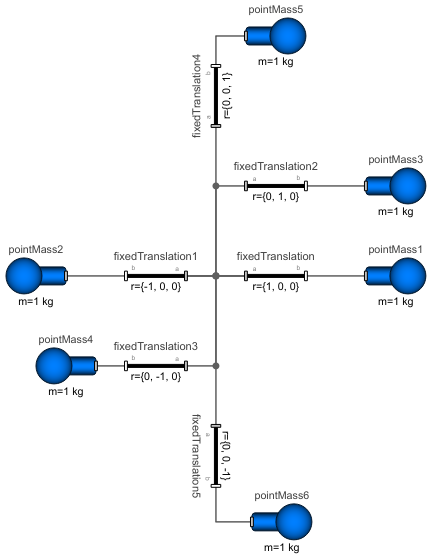
SystemWithStandardBodiesFor comparison purposes, an equivalent model with Bodies instead of PointMasses |
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.PointGravityWithPointMasses2.SystemWithStandardBodies"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
In order to compare the results of the "PointMass" example where 6 point masses are rigidly connected together, in this comparison model, an equivalent system is setup, with the only difference that the point masses are replaced by Bodies with zero inertia.
Components (12)
| pointMass1 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
|---|---|---|
| pointMass2 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
| pointMass3 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
| pointMass4 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
| pointMass5 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
| pointMass6 |
Type: PointMass Description: Body used at all places of the comparison model with zero inertia tensor |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation3 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation4 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation5 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Elementary Rigidly connected point masses in a point gravity field |