WOLFRAM SYSTEM MODELER
GyroscopicEffectsDemonstrates that a cylindrical body can be replaced by Rotor1D model |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects.GyroscopicEffects"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
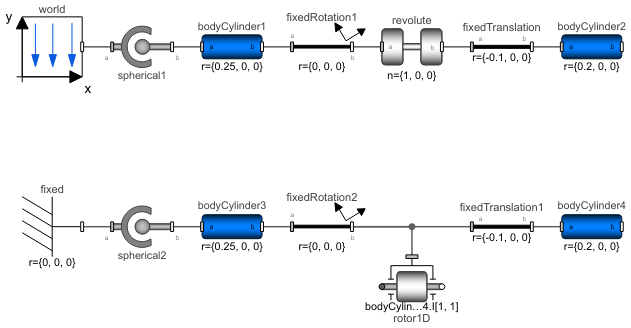
This example consists of a body that is attached to the world system with a spherical joint. On this body, a "rotor", i.e., a body with rotational symmetry is present. Two kinds of models are shown:
- In the upper part of the diagram layer, only multi-body components are used.
- In the lower part of the diagram layer, the same model is implemented, but by a different modeling of the cylindrical body: The cylindrical body is included, but it is rigidly attached to its mount. This part takes into account the movement of the center of mass and of the inertia tensor of the cylindrical body. Note, since the cylindrical body has rotational symmetry, its center of mass and its inertia tensor is independent of the angle of the inertia and can therefore be rigidly attached to its mount. Additionally, with a "MultiBody.Parts.Rotor1D" model, a primarily 1-dim. inertia is included that takes into account the additional effects when the cylindrical body is moving relatively to its mounts
The simulation reveals that both the kinematic movement and the reaction forces on the environment (object "world" and "fixed" respectively) are identical for both models.
A typical usage scenario is to model a complete drive train of a vehicle, including the automatic gearbox, with elements of the "Mechanics.Rotational" library, but using the "Rotor1D" model instead of the "Rotational.Components.Inertia" component. This drive train model can be mounted on a 3-dim. multi-body model of the vehicle. Additionally, one rigid body has to be fixed to the vehicle that has the mass, center of mass and inertia tensor of the complete drive train. Both models together, give exactly the same effect, as if every part of the drive train would have been modelled solely with mult-body components. One benefit of this modeling is that the simulation is much faster.
Components (14)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| spherical1 |
Type: Spherical Description: Spherical joint (3 constraints and no potential states, or 3 degrees-of-freedom and 3 states) |
|
| bodyCylinder1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| fixedRotation1 |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyCylinder2 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| spherical2 |
Type: Spherical Description: Spherical joint (3 constraints and no potential states, or 3 degrees-of-freedom and 3 states) |
|
| bodyCylinder3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| fixedRotation2 |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyCylinder4 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| rotor1D |
Type: Rotor1D Description: 1D inertia attachable on 3-dim. bodies (3D dynamic effects are taken into account if world.driveTrainMechanics3D=true) |