WOLFRAM SYSTEM MODELER
CompareBrakingTorqueCompare different braking torques |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.Rotational.Examples.CompareBrakingTorque"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
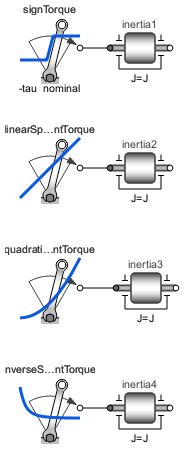
Compare the effect of different braking torques on inertia's angular velocity
(inertiaN.w, N = {1, 2, 3, 4}):
- Constant torque
- Linear speed dependent torque
- Quadratic speed dependent torque
- Inverse speed dependent torque
Parameters (5)
| J |
Value: 1 Type: Inertia (kg⋅m²) Description: Moment of inertia |
|---|---|
| w_start |
Value: 100 Type: AngularVelocity (rad/s) Description: Initial speed of inertia |
| tau_nominal |
Value: 100 Type: Torque (N⋅m) Description: Nominal torque |
| w_nominal |
Value: abs(w_start) Type: AngularVelocity (rad/s) Description: Nominal speed |
| w0 |
Value: 1 Type: AngularVelocity (rad/s) Description: Speed limit for regularization |
Components (8)
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| signTorque |
Type: SignTorque Description: Constant torque changing sign with speed |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| linearSpeedDependentTorque |
Type: LinearSpeedDependentTorque Description: Linear dependency of torque versus speed |
|
| inertia3 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| quadraticSpeedDependentTorque |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| inertia4 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inverseSpeedDependentTorque |
Type: InverseSpeedDependentTorque Description: Torque reciprocal dependent on speed |