WOLFRAM SYSTEM MODELER
LossyGearDemo1Example to show that gear efficiency may lead to stuck motion |
|
Diagram

Wolfram Language
In[1]:=
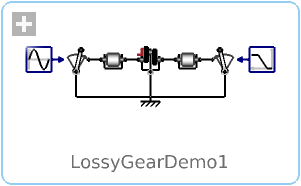
SystemModel["Modelica.Mechanics.Rotational.Examples.LossyGearDemo1"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This model contains two inertias which are connected by an ideal gear where the friction between the teeth of the gear is modeled in a physical meaningful way (friction may lead to stuck mode which locks the motion of the gear). The friction is defined by an efficiency factor (= 0.5) for forward and backward driving condition leading to a torque dependent friction loss. Simulate for about 0.5 seconds. The friction in the gear will take all modes (forward and backward rolling, as well as stuck).
You may plot:
Inertia1.w,
Inertia2.w : angular velocities of inertias
powerLoss : power lost in the gear
gear.mode : 1 = forward rolling
0 = stuck (w=0)
-1 = backward rolling
Note, powerLoss (= sum of the power flows of the connectors) and
gear.powerLoss (= gear.tau_loss*gear.w_a,
where gear.tau_loss is determined in a non-trivial way
from the stuck/sliding situation of the bearing and teeth friction;
= equation (16) in [Pelchen2002])
should be identical, or the difference should be close to zero, if model
LossyGear
is correctly implemented.
Components (8)
| gear |
Type: LossyGear Description: Gear with mesh efficiency and bearing friction (stuck/rolling possible) |
|
|---|---|---|
| Inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| Inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| torque1 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| torque2 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| DriveSine |
Type: Sine Description: Generate sine signal |
|
| load |
Type: Ramp Description: Generate ramp signal |
|
| fixed |
Type: Fixed Description: Flange fixed in housing at a given angle |