WOLFRAM SYSTEMMODELER
atan3bFour quadrant inverse tangent (select solution that is closest to given angle y0) |
|
Wolfram Language
In[1]:=

SystemModel["PlanarMechanics.Utilities.AtanLib.atan3b"]
Out[1]:=

Information
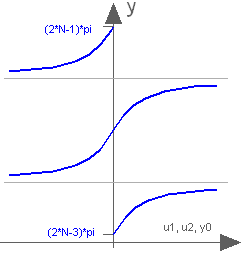
This function returns y = atan3(u1,u2,y0) such that
tan(y) = u1/u2 and
y is in the range: -pi < y-y0 < pi.
u2 may be zero, provided u1 is not zero. The difference to
Modelica.Math.atan2(..) is the optional third argument y0 that
allows to specify which of the infinite many solutions
shall be returned:
Syntax
y = atan3b(u1, u2, y0)
Inputs (3)
| u1 |
Type: Real |
|---|---|
| u2 |
Type: Real |
| y0 |
Default Value: 0 Type: Angle (rad) Description: y shall be in the range: -pi < y-y0 < pi |
Outputs (1)
| y |
Type: Angle (rad) |
|---|