WOLFRAM SYSTEM MODELER
CoordinateSystemVisualizing an orthogonal coordinate system of three axes |
|
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Visualizers.Advanced.CoordinateSystem"]
Out[1]:=
Information
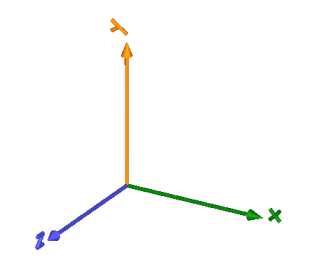
This element enbles visualization of an orthogonal coordinate system as shown in the following picture.
The variables r, R and r_shape
are declared as (time varying) input variables.
If the default equation is not appropriate, a corresponding
modifier equation has to be provided in the
model where a CoordinateSystem instance is used, e.g., in the form
PlanarMechanics.Visualizers.Advanced.CoordinateSystem coordinateSystem(r = {sin(time), 0, 0.3});
Color of each axis can be set individually using a RGB color space given in the range 0 .. 255. Predefined colors from Types.Defaults are used throughout the library to get a coherent visualization.
Parameters (8)
| axisLength |
Value: planarWorld.nominalLength / 2 Type: Length (m) Description: Length of world axes arrows |
|---|---|
| axisDiameter |
Value: axisLength / planarWorld.defaultFrameDiameterFraction Type: Diameter (m) Description: Diameter of world axes arrows |
| color_x |
Value: PlanarMechanics.Types.Defaults.FrameColor Type: Color Description: Color of x-arrow |
| color_y |
Value: color_x Type: Color Description: Color of y-arrow |
| color_z |
Value: color_x Type: Color Description: Color of z-arrow |
| axisShowLabels |
Value: true Type: Boolean Description: True, if labels shall be shown |
| labelStart |
Value: 1.05 * axisLength Type: Length (m) |
| scaledLabel |
Value: PlanarMechanics.Types.Defaults.FrameLabelHeightFraction * axisDiameter Type: Length (m) |
Inputs (3)
| r |
Default Value: {0, 0, 0} Type: Position[3] (m) Description: Position vector from origin of world frame to origin of object frame, resolved in world frame |
|---|---|
| R |
Default Value: MB.Frames.nullRotation() Type: Orientation Description: Orientation object to rotate the world frame into the object frame |
| r_shape |
Default Value: {0, 0, 0} Type: Position[3] (m) Description: Position vector from origin of object frame to shape origin, resolved in object frame |
Components (3)
| R |
Type: Orientation Description: Orientation object to rotate the world frame into the object frame |
|
|---|---|---|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
| coordinateSystem |
Type: CoordinateSystem Description: Visualizing an orthogonal coordinate system of three axes |