WOLFRAM SYSTEM MODELER
OuterRingModel of the outer ring of an SKF roller bearing |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.RollingBearings.Parts.OuterRing"]
Out[1]:=

Information
Outer Ring
The outer ring is stiff but has rigid body properties. The main dimensions can be seen following.
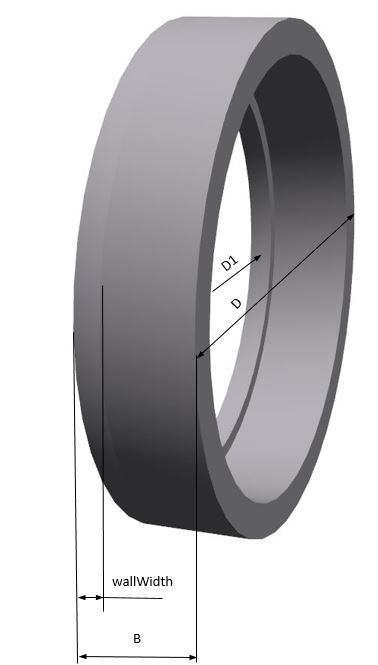
Figure 1: Outer ring.
Parameters (11)
| d |
Type: Diameter (m) Description: Bearing inner (bore) diameter |
|---|---|
| D |
Type: Diameter (m) Description: Bearing outer diameter |
| B |
Type: Distance (m) Description: Bearing width |
| d1 |
Type: Diameter (m) Description: Bearing innerring wall outer diamter |
| D1 |
Type: Diameter (m) Description: Outer diameter for roller |
| F |
Type: Diameter (m) Description: Inner diameter for roller |
| s |
Type: Distance (m) Description: Cage clearance |
| dRoller |
Type: Diameter (m) Description: Roller diameter |
| dLength |
Type: Distance (m) Description: Roller diameter |
| wallWidth |
Type: Distance (m) Description: Roller diameter |
| animateOuterRing |
Type: Boolean Description: Animate outer ring |
Connectors (1)
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|---|
Components (4)
| bodyCylinder3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
|---|---|---|
| bodyCylinder4 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| bodyCylinder5 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
Used in Components (1)
|
RotatingMachinery.RollingBearings.RollerBearings Roller bearing possible to parameterize with values corresponding |