WOLFRAM SYSTEM MODELER
HoverPIDControl the attitude and height of the quadrotor through PID controllers |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.ControlSystems.MultiRotorControllers.HoverPID"]
Out[1]:=
Information
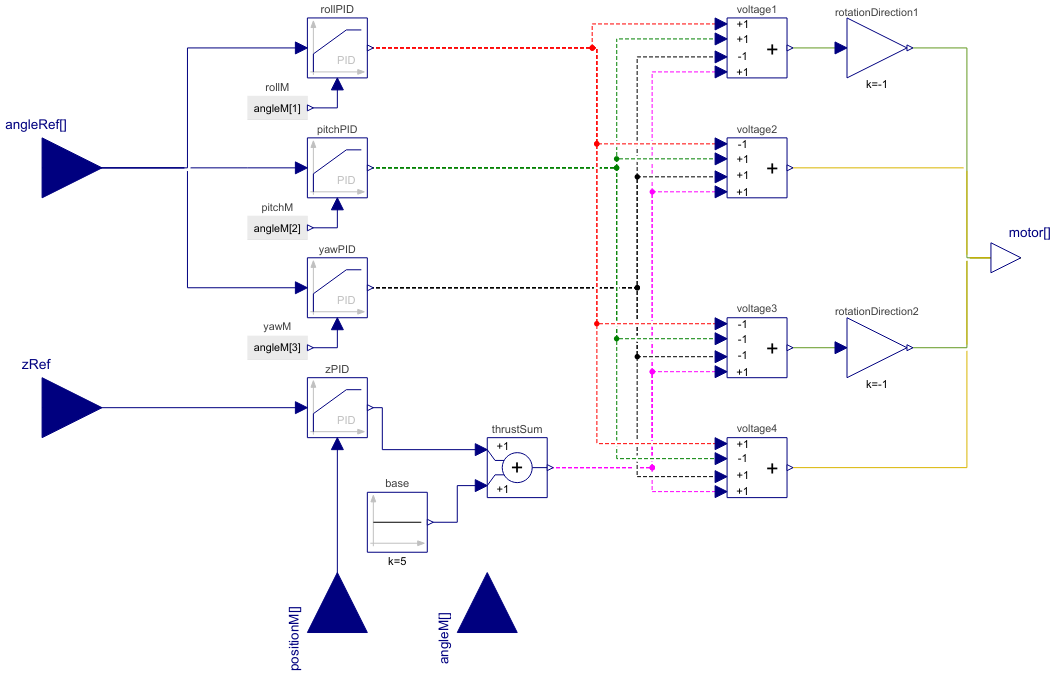
This model takes roll, pitch and yaw angles and vertical position (z), as inputs and produces voltage commands for the DC motors to control the quadrotor in its three degrees of freedom (DoF): roll (φ), pitch (θ) and height (z). To obtain the moment and throttle commands, the measured angles (roll (φ measured), pitch (θ measured), yaw (Ψ measured)) and height (z measured) are subtracted from their respective reference values. The resulting error values are then passed through the PID controllers to obtain the moments (L: roll moment, M: pitch moment, N: yaw moment) and force (throttle) increment; the moments are subsequently directed to the mixer for the distribution of force and moments to each DC motor. In the case of the throttle command, the additional thrust increment should be added to the base thrust, which represents the minimum required thrust to overcome the weight of the quadrotor.

Figure 1: Controller block diagram
Note: This controller is just applicable on the 3DoF quadrotor dynamic as it does not control the longitudinal and lateral positions of the quadcopter.
Note: The controller gains should be tuned based on the specific quadrotor and mission requirements.
Parameters (12)
| propGainRollPID |
Value: 10 Type: Real Description: Gain of controller (PIDRoll.k) |
|---|---|
| intTimeConstRollPID |
Value: 100 Type: Time (s) Description: Time constant of Integrator block (PIDRoll.Ti) |
| propGainPitchPID |
Value: 10 Type: Real Description: Gain of controller (PIDPitch.k) |
| intTimeConstPitchPID |
Value: 100 Type: Time (s) Description: Time constant of Integrator block (PIDPitch.Ti) |
| derTimeConstPitchPID |
Value: 0.1 Type: Time (s) Description: Time constant of Derivative block (PIDPitch.Td) |
| propGainYawPID |
Value: 100 Type: Real Description: Gain of controller (PIDYaw.k) |
| intTimeConstYawPID |
Value: 20 Type: Time (s) Description: Time constant of Integrator block (PIDYaw.Ti) |
| derTimeConstYawPID |
Value: 0.1 Type: Time (s) Description: Time constant of Derivative block (PIDYaw.Td) |
| propGainZPID |
Value: 50 Type: Real Description: Gain of controller (PIDHeight.k) |
| intGainZPID |
Value: 2 Type: Time (s) Description: Time constant of Integrator block (PIDHeight.Ti) |
| derGainZPID |
Value: 0.1 Type: Time (s) Description: Time constant of Derivative block (PIDHeight.Td) |
| derTimeConstRollPID |
Value: 0.1 Type: Time (s) Description: Time constant of Derivative block (PIDRoll.Td) |
Connectors (5)
| angleRef |
Type: RealInput[3] Description: Reference angle vector |
|
|---|---|---|
| motor |
Type: RealOutput[4] Description: Voltage command vector to electric motor |
|
| zRef |
Type: RealInput Description: Reference z position (height) |
|
| positionM |
Type: RealInput[3] Description: Measured position of the quadrotors |
|
| angleM |
Type: RealInput[3] Description: Measured angles of the quadrotor |
Components (15)
| voltage2 |
Type: Add4 Description: Voltage command of the northwest propeller motor |
|
|---|---|---|
| voltage3 |
Type: Add4 Description: Voltage command of the northeast propeller motor |
|
| voltage4 |
Type: Add4 Description: Voltage command of the southeeast propeller motor |
|
| voltage1 |
Type: Add4 Description: Voltage command of the southwest propeller motor |
|
| zPID |
Type: LimPID Description: PID controller generates z position (height) control command |
|
| yawPID |
Type: LimPID Description: PID controller generates yaw angle control command |
|
| pitchPID |
Type: LimPID Description: PID controller generates pitch angle control command |
|
| rollPID |
Type: LimPID Description: PID controller generates roll angle control command |
|
| rotationDirection2 |
Type: Gain Description: Change rotation of the propeller to clockwise direction |
|
| rotationDirection1 |
Type: Gain Description: Change rotation of the propeller to clockwise direction |
|
| rollM |
Type: RealExpression Description: Measured roll angle |
|
| yawM |
Type: RealExpression Description: Measured yaw angle |
|
| pitchM |
Type: RealExpression Description: Measured pitch angle |
|
| thrustSum |
Type: Add Description: The total of the basic thrust and the incremental thrust |
|
| base |
Type: Constant Description: Base thrust value equivalent to the quadrotor weight |
Used in Examples (1)
|
Aircraft.Examples Vertical motion of quadrotor system in 3DOF, constrained in z axis |