WOLFRAM SYSTEM MODELER
GliderAutopilotSwitchSwitch between the glider autopilot commands |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Examples.GliderTow.GliderAutopilotSwitch"]
Out[1]:=
Information
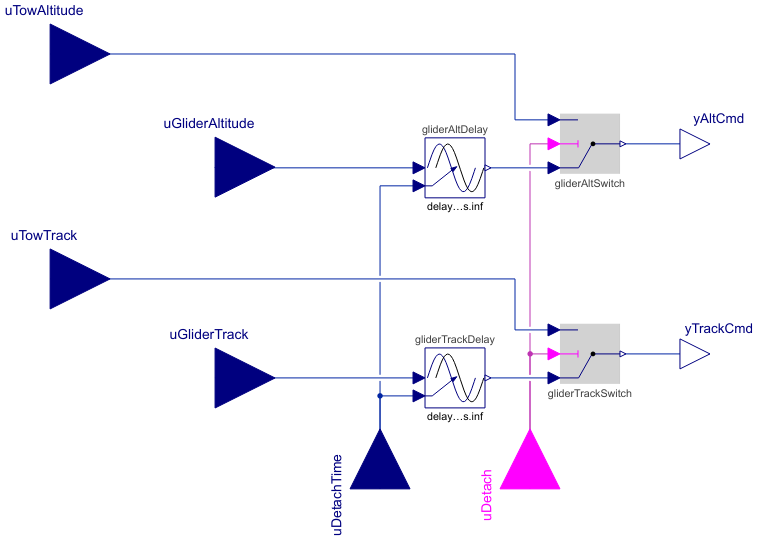
This class is made for the GliderTow example to switch between the reference trajectory commands given to the glider autopilot. The boolean signal sent from the TowingRope will trigger the switch from the common commands given for both aircraft to the commands given only to the glider. The reference altitude and track signals are delayed by the time from simulation start until the rope release through the time signal also sent from the TowingRope.
Connectors (8)
| yAltCmd |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| yTrackCmd |
Type: RealOutput Description: 'output Real' as connector |
|
| uGliderTrack |
Type: RealInput Description: 'input Real' as connector |
|
| uGliderAltitude |
Type: RealInput Description: 'input Real' as connector |
|
| uTowAltitude |
Type: RealInput Description: 'input Real' as connector |
|
| uTowTrack |
Type: RealInput Description: 'input Real' as connector |
|
| uDetach |
Type: BooleanInput Description: 'input Boolean' as connector |
|
| uDetachTime |
Type: RealInput Description: 'input Real' as connector |
Components (6)
| gliderAltDelay |
Type: VariableDelay Description: Delay for holding the glider altitude commands until the rope release |
|
|---|---|---|
| gliderAltSwitch |
Type: Switch Description: Switch between the glider altitude commands before and after rope release |
|
| gliderTrackDelay |
Type: VariableDelay Description: Delay for holding the glider track commands until the rope release |
|
| gliderTrackSwitch |
Type: Switch Description: Switch between the glider track commands before and after rope release |
|
| positiveDelayTime |
Type: Max Description: Pass through the largest signal |
|
| minDelay |
Type: Constant Description: Generate constant signal of type Real |
Used in Examples (1)
|
Aircraft.Examples Example of towing a glider up to cruise altitude by an electric aircraft |