WOLFRAM SYSTEM MODELER
GliderTowExample of towing a glider up to cruise altitude by an electric aircraft |
|
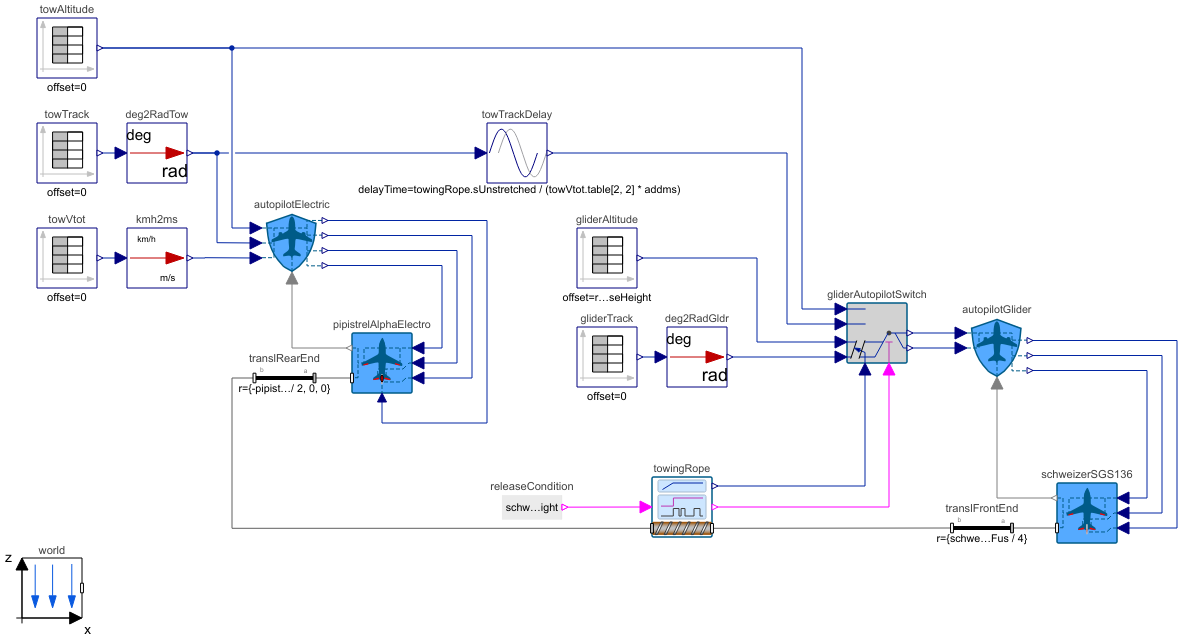
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Examples.GliderTow"]
Out[1]:=
Information
Towing of Glider up in the Air by an Electric Aircraft
In this example, a glider aircraft is towed up to a given release height by an electric aircraft from the initial altitude of 2000 m (6561 ft). A component representing the towing rope with a parameterized length releases the glider at the given release height.
Until the release height is achieved, the autopilots of both aircraft are given the same reference trajectory commands. However, the glider has no propulsion, and thus for its flight only the altitude and track are controlled. Additionally, the track command for the glider autopilot is delayed with a time corresponding to time it takes to proceed the length of the towing rope. This delay is added to avoid the glider ending up on either side of the flown trajectory of the tower, and thus not creating yaw moments for either aircraft. After the glider is released, its autopilot is given its own reference trajectory commands, and the custom made switch is used to switch between the commands and to hold the glider specific commands by delaying them until the rope release.
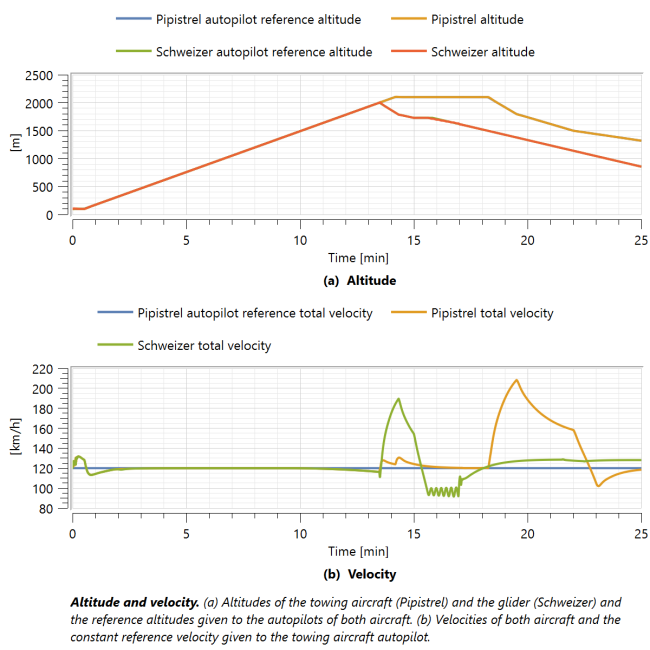
The altitude and velocity plot shows how the glider starts to accelerate after the rope release after the set release height if 2,000 m (6,562 ft) is achieved as the glider autopilot is given command to descend right after release. At around 15 min the glider is given command to fly at constant altitude resulting in heavy deceleration. Eventually both the altitude and velocity of the glider start to oscillate as it cannot sustain the given altitude with the decreased velocity. The oscillation ends as the glider catches up with the descending reference altitude command. Note that without propulsion, only the altitude and track angle are controlled for the glider.
The other plots in this example show the track angles vs. the reference track angles, the aerodynamic coefficients and the energies of both aircraft. Additionally, the towing rope length and force are plotted. There is also one control panel to explore how the changing of the release height and towing rope length affect the flown trajectories. For example, setting the towing rope length too small will show how too large pitch moments emerge in the very beginning of the simulation resulting in both aircraft crashing on the ground.
Parameters (2)
Components (19)
| schweizerSGS136 |
Type: SchweizerSGS136 Description: Mid-wing glider: Schweizer SGS 1-36 |
|
|---|---|---|
| pipistrelAlphaElectro |
Type: PipistrelAlphaElectro Description: Light-sport electric aircraft: Pipistrel Alpha Electro |
|
| autopilotElectric |
Type: AutopilotElectric Description: Autopilot for light aircraft with electric propulsion |
|
| towAltitude |
Type: TimeTable Description: Altitude commands for both aircraft during tow and for tug aircraft after rope release |
|
| deg2RadTow |
Type: From_deg Description: Convert from degree to radian |
|
| towVtot |
Type: TimeTable Description: Total velocity commands for tug aircraft |
|
| translFrontEnd |
Type: FixedTranslation Description: Translation from fuselage reference point to the front end of the fuselage |
|
| translRearEnd |
Type: FixedTranslation Description: Translation from fuselage reference point to the rear end of the fuselage |
|
| towTrack |
Type: TimeTable Description: Track commands for both aircraft during tow and for tug aircraft after rope release |
|
| autopilotGlider |
Type: AutopilotGlider Description: Autopilot for gliders |
|
| towTrackDelay |
Type: FixedDelay Description: Delay for glider track command for a time it takes to fly the towing rope length |
|
| towingRope |
Type: TowingRope Description: Model for towing rope |
|
| releaseCondition |
Type: BooleanExpression Description: Condition for releasing the towing rope (=true when released) |
|
| deg2RadGldr |
Type: From_deg Description: Convert from degree to radian |
|
| gliderTrack |
Type: TimeTable Description: Track commands for glider aircraft after rope release |
|
| gliderAltitude |
Type: TimeTable Description: Altitude commands for glider aircraft after rope release |
|
| gliderAutopilotSwitch |
Type: GliderAutopilotSwitch Description: Switch between the glider autopilot commands |
|
| kmh2ms |
Type: From_kmh Description: Convert from kilometre per hour to metre per second |
|
| world |
Type: World Description: World coordinate system used in aircraft libray |