WOLFRAM SYSTEM MODELER
CircularOrbitSpace shuttle in a circular orbit under Kepler dynamics |
|
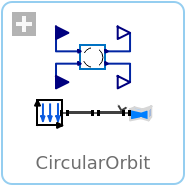
Diagram

Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.CircularOrbit"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (7)
| omega |
Value: 0.0011 Type: AngularFrequency (rad/s) Description: Angular velocity in default circular orbit |
|---|---|
| G |
Value: Modelica.Constants.G Type: Real (m³/(kg⋅s²)) Description: Gravitational constant |
| M |
Value: 1000 Type: Mass (kg) Description: Mass of object at the center of trajectory |
| m |
Value: 1 Type: Mass (kg) Description: Mass of orbiting object |
| phi0 |
Value: 0 Type: Angle (rad) Description: Initial polar angle |
| bodyVolume |
Value: 55.52171636674795 * uniformSizeScale ^ 3 Type: Volume (m³) Description: Volume of the orbiting object |
| uniformSizeScale |
Value: 0.01 Type: Length (m) Description: Factor by which dimensions of the orbiting object are rescaled |
Connectors (4)
| fphi |
Type: RealInput Description: Dimensionless external tangential force |
|
|---|---|---|
| fr |
Type: RealInput Description: Dimensionless external radial force |
|
| dphi |
Type: RealOutput Description: Dimensionless deviation in the tangential direction from circular orbit |
|
| dr |
Type: RealOutput Description: Dimensionless deviation in the radial direction from circular orbit |
Components (5)
| keplerDynamics |
Type: KeplerDynamics Description: Kepler dynamics with x and y variables parameterizing deviations from a circular orbit centered at the origin with constant angular velocity omega |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| translation |
Type: Translation Description: Translation of frame_b with respect to frame_a |
|
| shape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| rotation |
Type: Rotation Description: Fixed translation followed by a rotation of frame_b with respect to frame_a. This component rotates frame_a around an angle with a fixed axis. |