WOLFRAM SYSTEM MODELER
FixedShapeVisualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Visualizers.FixedShape"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model FixedShape defines a visual shape that is
shown at the location of its frame_a.
All describing data such as size and color can vary dynamically by
providing appropriate expressions in the input fields of the
parameter menu. The only exception is parameter shapeType
that cannot be changed during simulation.
The following shapes are currently supported via
parameter shapeType (e.g., shapeType="box"):
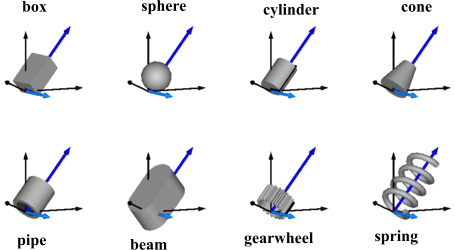
The dark blue arrows in the figure above are directed along variable lengthDirection. The light blue arrows are directed along variable widthDirection. The coordinate systems in the figure represent frame_a of the FixedShape component.
Additionally, external shapes can be specified as (not all options might be supported by all tools):
- "1", "2", …
define external shapes specified in DXF format in files "1.dxf", "2.dxf", … The DXF-files must be found either in the current directory or in the directory where the Shape instance is stored that references the DXF file. This (very limited) option should not be used for new models. Example:
shapeType="1". - "modelica://<Modelica-name>/<relative-path-file-name>"
characterizes the file that is stored under the location of the <Modelica-name> library path with the given relative file name. Example:
shapeType = "modelica://Modelica/Resources/Data/Shapes/Engine/piston.dxf". - "file:///<absolute-file-name>"
characterizes an absolute file name in the file system. Example:
shapeType="file:///C:/users/myname/shapes/piston.dxf".
The supported file formats are tool dependent. Most tools support at least DXF-files but may support other format as well (such as stl, obj, 3ds). Since visualization files contain color and other data, the corresponding information in the model is usually ignored. For information about DXF files, see Wikipedia. As a default it is assumed that the DXF coordinates are in the "frame_a"-system and in meters, and that the 3dfaces are two-sided. Some tools support only 3dface (for geometry) and layer (for advanced coloring).
The sizes of any of the above components are specified by the length, width and height variables. Via variable extra additional data can be defined:
| shapeType | Meaning of parameter extra |
|---|---|
| "cylinder" | if extra > 0, a black line is included in the cylinder to show the rotation of it. |
| "cone" | extra = diameter-left-side / diameter-right-side, i.e., extra = 1: cylinder extra = 0: "real" cone. |
| "pipe" | extra = outer-diameter / inner-diameter, i.e, extra = 1: cylinder that is completely hollow extra = 0: cylinder without a hole. |
| "gearwheel" | extra is the number of teeth of the (external) gear. If extra < 0, an internal gear is visualized with |extra| teeth. The axis of the gearwheel is along "lengthDirection", and usually: width = height = 2*radiusOfGearWheel. |
| "spring" | extra is the number of windings of the spring. Additionally, "height" is not the "height" but 2*coil-width. |
| external shape | extra = 0: Visualization from file is not scaled. extra = 1: Visualization from file is scaled with "length", "width" and "height" of the shape |
Parameter color is a vector with 3 elements, {r, g, b}, and specifies the color of the shape. {r, g, b} are the "red", "green" and "blue" color parts. Note, r, g and b are given as Integer[3] in the ranges 0 … 255, respectively. The predefined type MultiBody.Types.Color contains a menu definition of the colors used in the MultiBody library together with a color editor.
Parameters (2)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| shapeType |
Value: "box" Type: ShapeType Description: Type of shape |
Inputs (9)
| r_shape |
Default Value: {0, 0, 0} Type: Position[3] (m) Description: Vector from frame_a to shape origin, resolved in frame_a |
|---|---|
| lengthDirection |
Default Value: {1, 0, 0} Type: Axis Description: Vector in length direction of shape, resolved in frame_a |
| widthDirection |
Default Value: {0, 1, 0} Type: Axis Description: Vector in width direction of shape, resolved in frame_a |
| length |
Type: Distance (m) Description: Length of shape |
| width |
Type: Distance (m) Description: Width of shape |
| height |
Type: Distance (m) Description: Height of shape |
| color |
Default Value: {0, 128, 255} Type: Color Description: Color of shape |
| extra |
Default Value: 0.0 Type: ShapeExtra Description: Additional data for cylinder, cone, pipe, gearwheel and spring |
| specularCoefficient |
Default Value: world.defaultSpecularCoefficient Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
Connectors (1)
| frame_a |
Type: Frame_a Description: Coordinate system in which visualization data is resolved |
|---|
Components (2)
Used in Examples (2)
|
Modelica.Mechanics.MultiBody.Examples.Elementary Rolling wheel set that is driven by torques driving the wheels |
|
|
Modelica.Mechanics.MultiBody.Examples.Elementary Rolling wheel set that is pulled by a force |
Used in Components (3)
|
Modelica.Mechanics.MultiBody.Examples.Loops.Utilities One cylinder with analytic handling of kinematic loop and CAD visualization |
|
|
Modelica.Mechanics.MultiBody.Parts Ideal rolling wheel on flat surface z=0 (5 positional, 3 velocity degrees of freedom) |
|
|
Modelica.Mechanics.MultiBody.Parts Ideal rolling wheel set consisting of two ideal rolling wheels connected together by an axis |