WOLFRAM SYSTEM MODELER
RollingWheelSetPullingRolling wheel set that is pulled by a force |
|
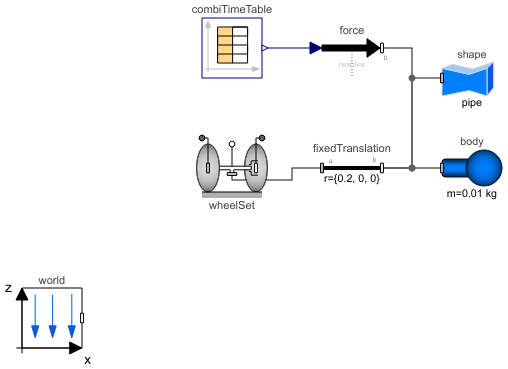
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.RollingWheelSetPulling"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Demonstrates how a RollingWheelSet (two wheels rigidly coupled together) is rolling on ground when pulled by an external force.
Components (7)
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| wheelSet |
Type: RollingWheelSet Description: Ideal rolling wheel set consisting of two ideal rolling wheels connected together by an axis |
|
| body |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| combiTimeTable |
Type: CombiTimeTable Description: Table look-up with respect to time and various interpolation and extrapolation methods (data from matrix/file) |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| shape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |