WOLFRAM SYSTEM MODELER
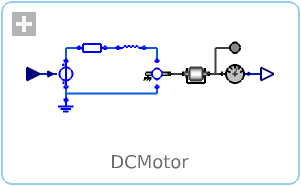
DCMotorA model of a DC motor |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.InvertedPendulum.Components.DCMotor"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (4)
| R |
Value: 13 Type: Resistance (Ω) |
|---|---|
| L |
Value: 1 Type: Inductance (H) |
| J |
Value: 1 Type: Inertia (kg⋅m²) |
| EMFk |
Value: 1.6 Type: ElectricalTorqueConstant (N⋅m/A) |
Connectors (3)
| w |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| V |
Type: RealInput Description: 'input Real' as connector |
|
| flange_a1 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
Components (7)
| resistor |
Type: Resistor Description: Ideal linear electrical resistor |
|
|---|---|---|
| inductor |
Type: Inductor Description: Ideal linear electrical inductor |
|
| EMF1 |
Type: RotationalEMF Description: Electromotoric force (electric/mechanic transformer) |
|
| ground |
Type: Ground Description: Ground node |
|
| signalVoltage |
Type: SignalVoltage Description: Generic voltage source using the input signal as source voltage |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
Used in Examples (2)
|
DocumentationExamples.Modeling.InvertedPendulum.Components An inverted pendulum system |
|
|
DocumentationExamples.Modeling.InvertedPendulum.InvertedPendulumStateFeedback An inverted pendulum system |