WOLFRAM SYSTEM MODELER
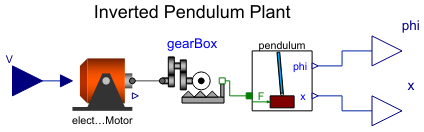
InvertedPendulumModelAn inverted pendulum system |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.InvertedPendulum.Components.InvertedPendulumModel"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (1)
| referenceType |
Value: 2 Type: Integer Description: Type of reference signal: 1=step, 2=pulse, 3=time table |
|---|
Connectors (3)
| V |
Type: RealInput Description: 'input Real' as connector |
|
|---|---|---|
| x |
Type: RealOutput Description: 'output Real' as connector |
|
| phi |
Type: RealOutput Description: 'output Real' as connector |