WOLFRAM SYSTEM MODELER
MotorA simplified voltage controlled motor |
|
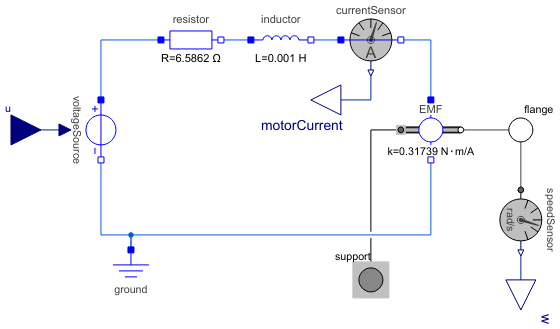
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.ElectricalEngineering.LEGOSegway.Components.Motor"]
Out[1]:=
Information
This models the DC motor in the LEGO kit.
Connectors (5)
| u |
Type: RealInput Description: 'input Real' as connector |
|
|---|---|---|
| flange |
Type: Flange_b Description: One-dimensional rotational flange of a shaft (non-filled circle icon) |
|
| w |
Type: RealOutput Description: 'output Real' as connector |
|
| motorCurrent |
Type: RealOutput Description: 'output Real' as connector |
|
| support |
Type: Support Description: Support/housing flange of a one-dimensional rotational shaft |
Components (7)
| voltageSource |
Type: SignalVoltage Description: Generic voltage source using the input signal as source voltage |
|
|---|---|---|
| resistor |
Type: Resistor Description: Ideal linear electrical resistor |
|
| inductor |
Type: Inductor Description: Ideal linear electrical inductor |
|
| EMF |
Type: RotationalEMF Description: Electromotoric force (electric/mechanic transformer) |
|
| ground |
Type: Ground Description: Ground node |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| currentSensor |
Type: CurrentSensor Description: Sensor to measure the current in a branch |
Used in Components (1)
|
EducationExamples.ElectricalEngineering.LEGOSegway.Components Contains a base model of a LEGO Segway |