WOLFRAM SYSTEM MODELER
TensionSpringDamperOne-directional tension spring with damping |
|
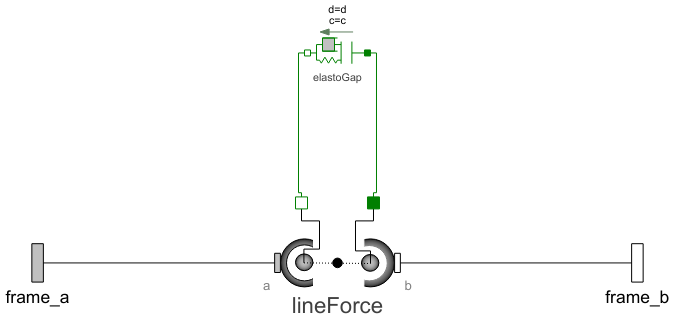
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.Joystick.Components.TensionSpringDamper"]
Out[1]:=
Information
This component models a one-directional tension spring with damping.
Parameters (8)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| showMass |
Value: true Type: Boolean Description: = true, if point mass shall be visualized as sphere if animation=true and m>0 |
| c |
Type: TranslationalSpringConstant (N/m) Description: Spring constant |
| d |
Type: Real (N/(m/s)) Description: Damping constant |
| s_unstretched |
Value: 0 Type: Length (m) Description: Unstretched spring length |
| m |
Value: 0 Type: Mass (kg) Description: Spring mass located on the connetion line between the origin of frame_a and the origin of frame_b |
| lengthFraction |
Value: 0.5 Type: Real Description: Location of spring mass with respect to frame_a as a fraction of the distance from frame_a to frame_b (=0: at frame_a; =1: at frame_b) |
| numberOfWindings |
Value: 5 Type: Integer Description: Number of spring windings |
Inputs (6)
| width |
Default Value: world.defaultForceWidth Type: Distance (m) Description: Width of spring |
|---|---|
| coilWidth |
Default Value: width / 10 Type: Distance (m) Description: Width of spring coil |
| color |
Default Value: Modelica.Mechanics.MultiBody.Types.Defaults.SpringColor Type: Color Description: Color of spring |
| specularCoefficient |
Default Value: world.defaultSpecularCoefficient Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
| massDiameter |
Default Value: max(0, (width - 2 * coilWidth) * 0.9) Type: Diameter (m) Description: Diameter of mass point sphere |
| massColor |
Default Value: Modelica.Mechanics.MultiBody.Types.Defaults.BodyColor Type: Color Description: Color of mass point |
Connectors (2)
Components (3)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| lineForce |
Type: LineForceWithMass Description: General line force component with an optional point mass on the connection line |
|
| elastoGap |
Type: ElastoGap Description: 1D translational spring damper combination with gap |
Used in Components (3)
|
EducationExamples.MechanicalEngineering.Joystick.Components Joystick re-centering mechanism with three tension springs |
|
|
EducationExamples.MechanicalEngineering.Joystick.Components Joystick re-centering mechanism with four tension springs |
|
|
EducationExamples.MechanicalEngineering.Joystick.Components Joystick re-centering mechanism with six tension springs |