WOLFRAM SYSTEM MODELER
SmallRightTireModels a LEGO tire |
|
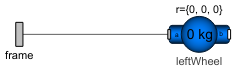
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.LEGOSegway.Components.SmallRightTire"]
Out[1]:=

Information
This models the right tire of a LEGO Segway.
Parameters (1)
| d_legoBody |
Value: 1e-05 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: LEGO Body damper constant |
|---|
Connectors (1)
| frame |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|---|
Components (1)
| leftWheel |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|---|
Used in Components (1)
|
EducationExamples.MechanicalEngineering.LEGOSegway.Components Contains a base model of a LEGO Segway |