WOLFRAM SYSTEM MODELER
BungeeJumpAn example exploring the dynamics of a bungee jump. |
|
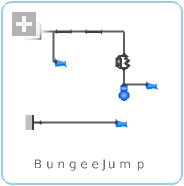
Diagram

Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.BungeeJump"]
Out[1]:=
Information
Bungee Jump: Simulate Multibody Systems
Introduction
This is a simple model of a bungee jumper consisting of a mass attached to a platform by a spring and damper.
Automatic 3D Animation
Multibody systems have visualizers to show what a real-world system would look like.
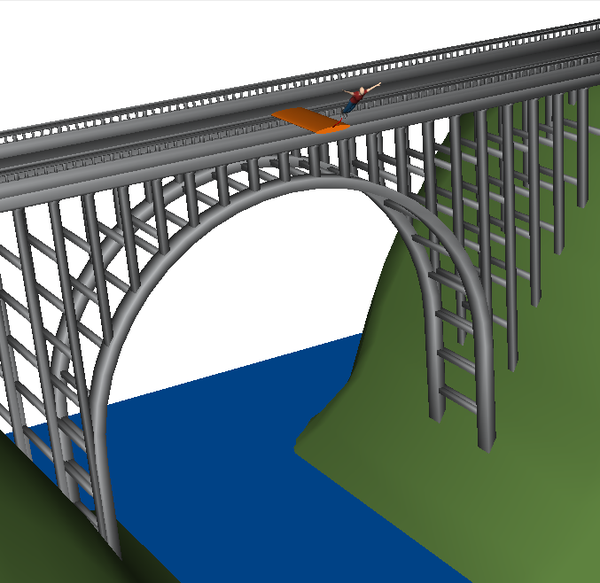
To simulate the model and view a 3D animation of it, follow the steps below:
- Click the
 button in the top-right corner.
button in the top-right corner. - When the build is finished, click the Simulate button
 .
. - Click the Animate button
 .
. - Use your mouse or trackpad to drag the animation to a good angle and zoom in with your scroll wheel or by using the trackpad. Then click the Play button to play the animation.
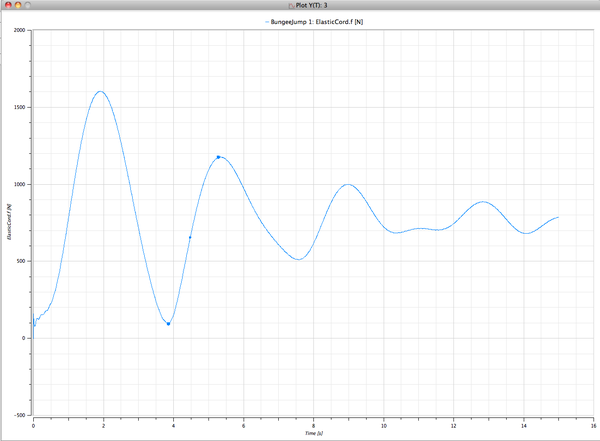
Instant Plotting
Explore the how the force on the cord varies with time by simulating and plotting the variable ElasticCord.f.
The variable will automatically be plotted when the model is simulated.
Change Parameters
Changing parameters for the simulation can be done rapidly in Simulation Center. Switch to the Parameters tab and enter a new value for the parameter you would like to vary.
Simulate again to see the effects of your changes.
 Terms and Conditions of Use
Terms and Conditions of Use
 Terms and Conditions of Use
Terms and Conditions of UseParameters (5)
| c |
Value: 240 Type: TranslationalSpringConstant (N/m) Description: Bungee cord elasticity |
|---|---|
| d |
Value: 40 Type: TranslationalDampingConstant (N·s/m) Description: Bungee cord damping constant |
| m |
Value: 75 Type: Mass (kg) Description: Jumper mass |
| initialPosition |
Value: {3.1, 0, 0} Type: Length[3] (m) Description: Initial position of the jumper |
| initialVelocity |
Value: {3.5, 2.0, 0.0} Type: Velocity[3] (m/s) Description: Initial velocity of the jumper |
Components (9)
| world |
Type: World |
|
|---|---|---|
| ElasticCord |
Type: SpringDamperParallel |
|
| Platform |
Type: FixedTranslation |
|
| fixed1 |
Type: Fixed |
|
| Ground |
Type: FixedShape |
|
| Jumper |
Type: Body |
|
| JumperTexture |
Type: FixedShape |
|
| BridgeTexture |
Type: FixedShape |
|
| BridgeToPlatform |
Type: FixedTranslation |