WOLFRAM SYSTEM MODELER
BallBall subject to magnus forces. |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.GolfAndSoccer.Components.Ball"]
Out[1]:=
Information
Ball Component
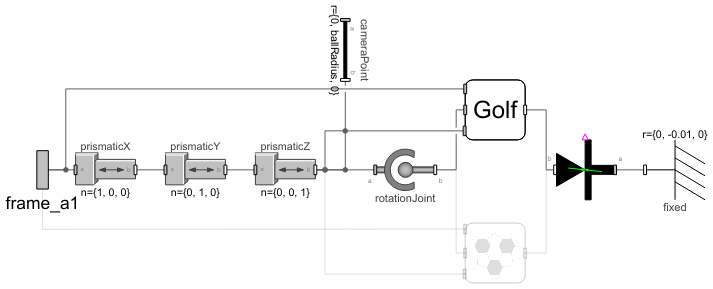
The ball component consists of three prismatic joints and one spherical rotation joint connected to both a golf ball component and a soccer ball component. Depending on the Boolean variable modelInUse, either the soccer model or the golf model will be active. That means that the other model will not exist.
Above is the diagram view of the ball component. The two ball models are so-called conditional components and will only exist if some condition is true. In this case, if modelInUse is equal to one or two.
Changing Friction
To change the friction coefficients of the ground, click the component called softSupportingPlane. Under the General tab, you can change the static and dynamic friction coefficient values, here denoted mu_static and mu_dynamic.
Parameters (6)
| ballMass |
Value: 999 Type: Mass (kg) Description: Mass of the ball |
|---|---|
| ballRadius |
Value: 999 Type: Length (m) Description: Radius of the ball |
| modelInUse |
Value: 2 Type: Integer |
| initVel |
Type: Velocity[3] (m/s) Description: Starting velocity of the ball |
| initAngVel |
Type: AngularVelocity[3] (rad/s) Description: Starting angular velocity of the ball |
| initPos |
Type: Position[3] (m) Description: Starting position of the ball |
Connectors (1)
| frame_a1 |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|---|
Components (9)
| prismaticX |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| prismaticY |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| prismaticZ |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| rotationJoint |
Type: Spherical Description: Spherical joint (3 constraints and no potential states, or 3 degrees-of-freedom and 3 states) |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| softSupportingPlane |
Type: SoftSupportingPlane Description: Contact element for free kick and golf model. |
|
| soccer |
Type: Soccer Description: Soccer model with visualizers. |
|
| cameraPoint |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| golf |
Type: Golf Description: Golf with visualizers. |
Used in Components (1)
|
EducationExamples.Physics.GolfAndSoccer.Components Base class, used to both represent a soccer free kick and a golf swing. |