WOLFRAM SYSTEM MODELER
GolfVisualizersVisualizers for golf model. |
|
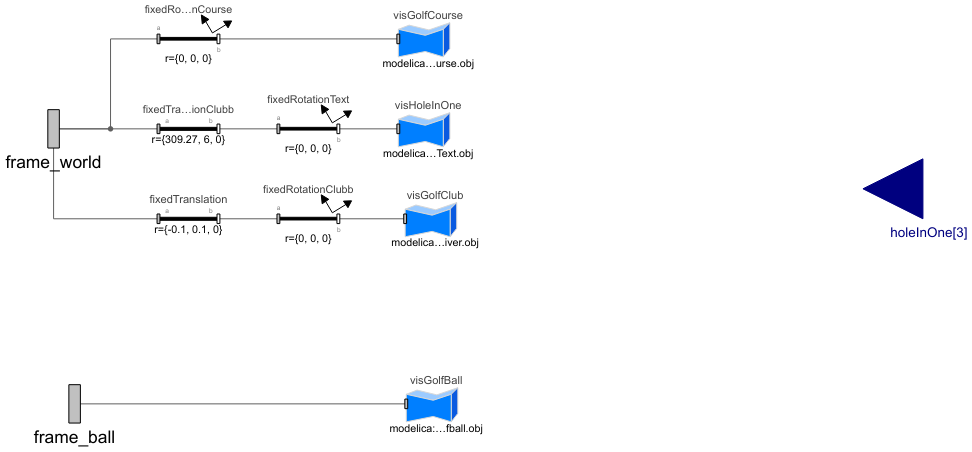
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.GolfAndSoccer.Components.GolfVisualizers"]
Out[1]:=
Information
This model contains different CAD shapes at different positions to create a golf animation.
Connectors (3)
| frame_world |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| frame_ball |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| holeInOne |
Type: RealInput[3] Description: 'input Real' as connector |
Components (9)
| visGolfCourse |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
|---|---|---|
| fixedRotationCourse |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| fixedTranslationClubb |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| visHoleInOne |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| fixedRotationText |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| visGolfClub |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedRotationClubb |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| visGolfBall |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Components (1)
|
EducationExamples.Physics.GolfAndSoccer.Components Golf with visualizers. |