WOLFRAM SYSTEM MODELER
RotorLiftForceGenerator for periodic impulses |
|
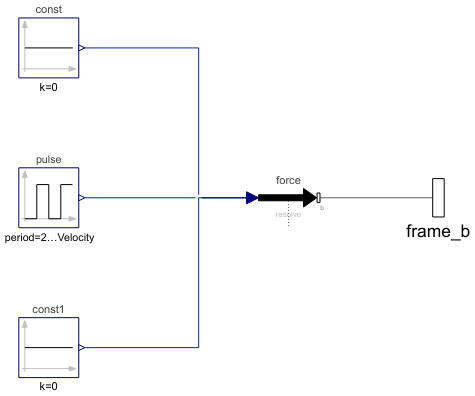
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.GyroscopicPrecession.Components.RotorLiftForce"]
Out[1]:=
Information
This component produces a series of periodic impulses of force in the positive y direction. It is used in the helicopter model as a simplified description of how a helicopter controls its rotor blades to give lift force at a proper angle during every revolution in order to accelerate forward.
Parameters (6)
| angularVelocity |
Type: AngularVelocity (rad/s) Description: Velocity of the rotor blade |
|---|---|
| phase |
Type: Angle (rad) Description: Phase ofset of the rotor blade |
| duty |
Type: Period (s) Description: Force duty |
| magnitude |
Type: Force (N) Description: Force magnitude |
| magnitudeOffset |
Type: Force (N) Description: Force offset |
| liftStart |
Type: Force (N) Description: Start force |
Connectors (1)
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|---|
Components (4)
| const |
Type: Constant Description: Generate constant signal of type Real |
|
|---|---|---|
| pulse |
Type: Pulse Description: Generate pulse signal of type Real |
|
| const1 |
Type: Constant Description: Generate constant signal of type Real |
|
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
Used in Examples (1)
|
EducationExamples.Physics.GyroscopicPrecession Example of how gyroscopic precession works on a simple helicopter model. |