WOLFRAM SYSTEM MODELER
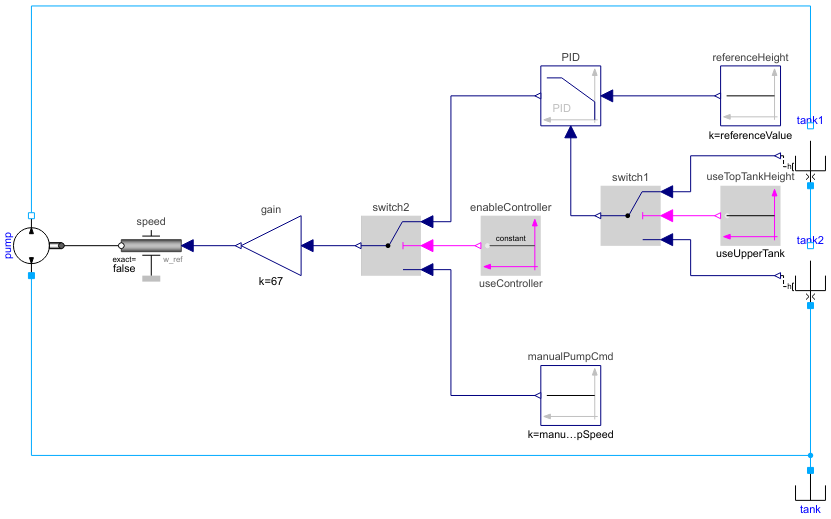
DoubleTankSystemExample circuit with two tanks connected in series |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.Accumulators.DoubleTankSystem"]
Out[1]:=
Information
This is an example of a double tank system. The pump can be manually or automatically controlled. The fluid level from one of the tanks can be used as input to the PID-controller.
Fig. 1 shows the fluid level of the lower tank and the desired level. Fig. 2 shows the pump speed.
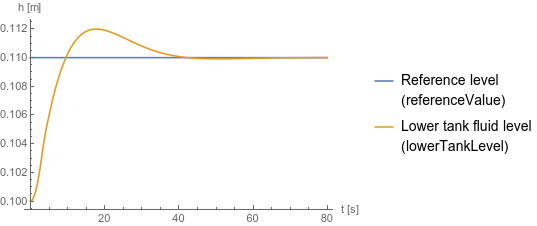
Fig. 1 Reference fluid level and lower tank fluid level
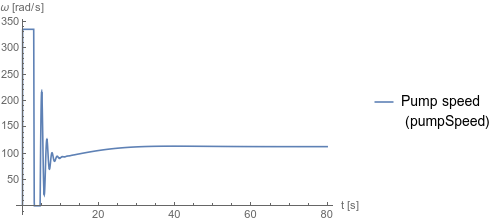
Fig. 2 Pump speed
Fig. 1 shows the fluid level of the lower tank and the desired level. Fig. 2 shows the pump speed.
Fig. 1 Reference fluid level and lower tank fluid level
Fig. 2 Pump speed
Parameters (8)
| medium |
Value: Hydraulic.Media.Water20() Type: Medium Description: Medium in the component |
|---|---|
| d_bottom |
Value: 0.05 Type: Diameter (m) |
| d_outlet |
Value: 0.005 Type: Diameter (m) |
| referenceValue |
Value: 0.11 Type: Height (m) Description: Desired fluid level |
| useUpperTank |
Value: false Type: Boolean Description: Use the upper tank fluid level as target |
| manualPumpSpeed |
Value: 5 Type: AngularVelocity (rad/s) Description: Manual pump speed |
| tank1_h0 |
Value: 0.1 Type: Length (m) Description: Tank height (tank1.h.start) |
| tank2_h0 |
Value: 0.1 Type: Length (m) Description: Tank height (tank2.h.start) |
Components (14)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| tank1 |
Type: TankWithOutlet Description: Model of a tank with environment pressure at inlet, hydrostatic pressure at the bottom, and an outlet orifice |
|
| tank2 |
Type: TankWithOutlet Description: Model of a tank with environment pressure at inlet, hydrostatic pressure at the bottom, and an outlet orifice |
|
| tank |
Type: Tank Description: Simple tank with constant pressure |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| speed |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| referenceHeight |
Type: Constant Description: Generate constant signal of type Real |
|
| switch1 |
Type: Switch Description: Switch between two Real signals |
|
| useTopTankHeight |
Type: BooleanConstant Description: Generate constant signal of type Boolean |
|
| manualPumpCmd |
Type: Constant Description: Generate constant signal of type Real |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| PID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| enableController |
Type: BooleanConstantVariability Description: Generate constant signal of type Boolean |
|
| switch2 |
Type: Switch Description: Switch between two Real signals |