WOLFRAM SYSTEM MODELER
HydrostaticTransmissionExample circuit of a pump driving a motor |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.Rotation.HydrostaticTransmission"]
Out[1]:=
Information
This model shows an example of how to model a hydrostatic transmission with an angular velocity feedback controlling a variable displacement pump. The system is protected by one pressure relief valve on each side. Additional oil is supplied to the system from the pressure sources through very small orifices.
Fig. 1 shows the desired motor speed and the actual motor speed. Fig. 2 shows how the pump displacement is used to control the motor speed.
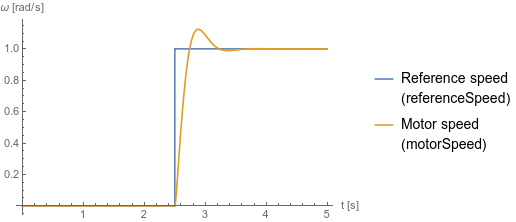
Fig. 1 Motor speed and reference speed
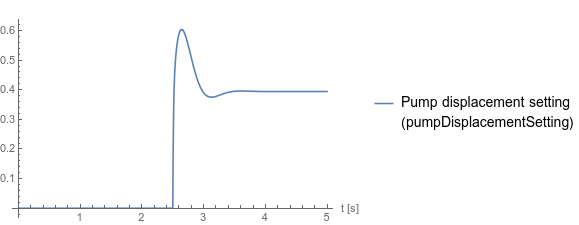
Fig. 2 Pump displacement setting
Fig. 1 shows the desired motor speed and the actual motor speed. Fig. 2 shows how the pump displacement is used to control the motor speed.
Fig. 1 Motor speed and reference speed
Fig. 2 Pump displacement setting
Parameters (1)
| medium |
Value: Oil() Type: Medium Description: Medium in the component |
|---|
Components (22)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| constantSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| pressureReliefValve1 |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| pressureReliefValve2 |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| motor |
Type: Motor Description: Model of a motor with fixed displacement and volumes |
|
| pump |
Type: PumpVariable Description: Model of a pump with variable displacement and volumes |
|
| volume1 |
Type: Volume Description: Fixed volume with fluid storage |
|
| volume2 |
Type: Volume Description: Fixed volume with fluid storage |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank4 |
Type: Tank Description: Simple tank with constant pressure |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| step |
Type: Step Description: Generate step signal of type Real |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| gain2 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| integrator |
Type: Integrator Description: Output the integral of the input signal with optional reset |
|
| add1 |
Type: Add Description: Output the sum of the two inputs |
|
| firstOrder1 |
Type: FirstOrder Description: First order transfer function block (= 1 pole) |
|
| fixedLaminarThrottle1 |
Type: FixedLaminarThrottle Description: Laminar restriction using conductance |
|
| fixedLaminarThrottle2 |
Type: FixedLaminarThrottle Description: Laminar restriction using conductance |