WOLFRAM SYSTEM MODELER
PumpVariableModel of a pump with variable displacement and volumes |
|
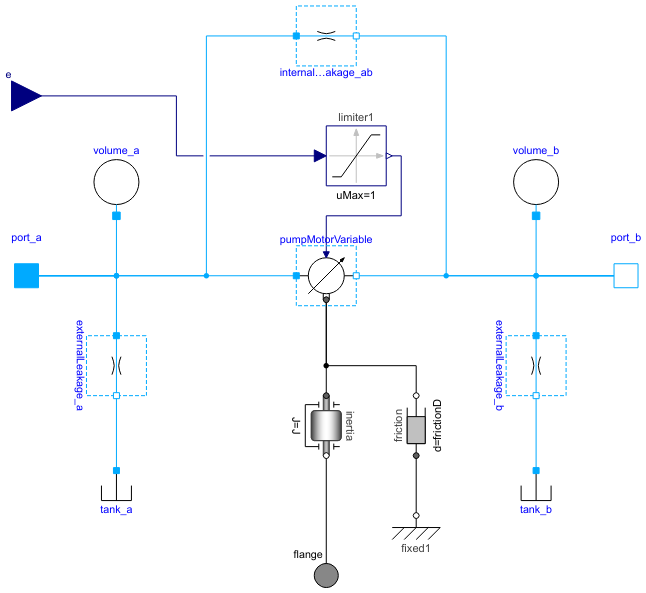
Diagram
Wolfram Language
In[1]:=
SystemModel["Hydraulic.PumpsAndMotors.PumpVariable"]
Out[1]:=
Information
This is a model of a pump with volumes, variable displacement setting, friction, and internal and external leakage. The axial speed is proportional to the flow rate:

The torque is proportional to the pressure difference:

where
The signal is limited to +/-1 and controls the flow according to the table below:
The torque is proportional to the pressure difference:
where
 | : | Mass flow rate | |
 | : | Fluid density | |
| D | : | Maximum displacement | |
| u | : | Displacement setting | |
 | : | Pressure difference between the ports | |
 | : | Torque | |
 | : | Angular velocity |
The signal is limited to +/-1 and controls the flow according to the table below:
| u>=1 | : | Maximum flow from port a to port b | |
| u=0 | : | Only leakage flow from port a to port b | |
| u<=-1 | : | Maximum flow from port b to port a |
Limitations
Volumetric efficiency is not included in the model.Reference
Industrial Hydraulics Manual, 5th ed., Maumee, OH: Eaton Hydraulics Training Services, 2008 p. 164.Parameters (8)
| medium |
Value: Oil() Type: Medium Description: Medium in the component |
|---|---|
| D |
Type: Volume (m³) Description: Displacement per revolution |
| externalLeakage |
Value: 1e-12 Type: PressureDependentLeakage (m³/(s⋅Pa)) Description: Leakage between cylinders |
| internalLeakage |
Value: 1e-12 Type: PressureDependentLeakage (m³/(s⋅Pa)) Description: Leakage between cylinders |
| frictionD |
Value: 1 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Viscous friction |
| J |
Value: 1 Type: MomentOfInertia (kg⋅m²) Description: Moments of inertia |
| tankPressure |
Value: 100000.0 Type: Pressure (Pa) Description: Tank pressure |
| V |
Value: 0.0001 Type: Volume (m³) Description: Volume |
Connectors (4)
| port_b |
Type: Port_b Description: Port for hydraulic fluid (unfilled icon) |
|
|---|---|---|
| port_a |
Type: Port_a Description: Port for hydraulic fluid (filled icon) |
|
| flange |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| e |
Type: RealInput Description: Displacement setting between -1 and 1 |
Components (13)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| volume_b |
Type: Volume Description: Fixed volume with fluid storage |
|
| volume_a |
Type: Volume Description: Fixed volume with fluid storage |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| friction |
Type: Damper Description: Linear 1D rotational damper |
|
| pumpMotorVariable |
Type: BasicDisplacementMachine Description: Model of a pump/motor with variable displacement and no volumes |
|
| externalLeakage_b |
Type: RestrictionLaminar Description: Laminar restriction using conductance |
|
| tank_b |
Type: Tank Description: Simple tank with constant pressure |
|
| tank_a |
Type: Tank Description: Simple tank with constant pressure |
|
| externalLeakage_a |
Type: RestrictionLaminar Description: Laminar restriction using conductance |
|
| internalLeakage_ab |
Type: RestrictionLaminar Description: Laminar restriction using conductance |
|
| fixed1 |
Type: Fixed Description: Flange fixed in housing at a given angle |
|
| limiter1 |
Type: Limiter Description: Limit the range of a signal |
Used in Examples (1)
|
Hydraulic.Examples.Rotation Example circuit of a pump driving a motor |