WOLFRAM SYSTEM MODELER
EscapementForkModel of escapement fork. |
|
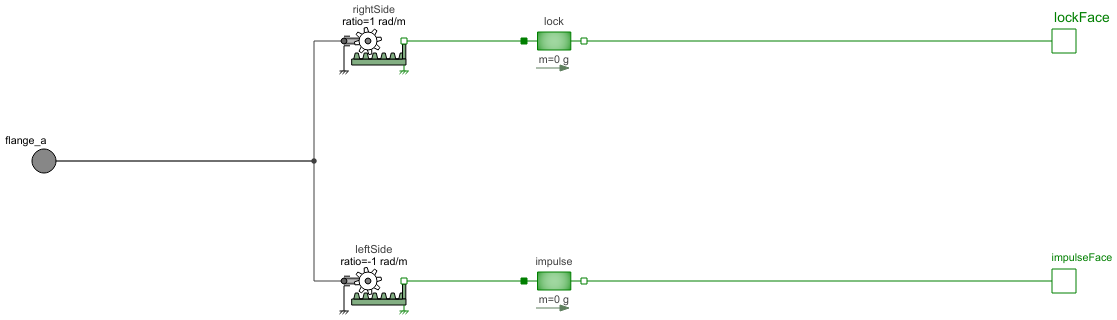
Diagram
Wolfram Language
In[1]:=
SystemModel["IndustryExamples.ConsumerProducts.PendulumClock.Components.EscapementFork"]
Out[1]:=
Information
The fork applies a braking force on a gear. When the pendulum pushes on the fork, and if the translational position of the pendulum exceeds a certain threshold, the fork will release its grip on the gear. When the pendulum swings back, the grip will be restored. The fork also transfers energy from the escapement wheel to the pendulum to compensate for energy lost due to friction.
The escapement fork here is modeled using two rotational to translational components with opposite signs on their ratios. When one face of the fork goes down, the other swings up.
Connectors (3)
| flange_a |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
|---|---|---|
| lockFace |
Type: Flange_b Description: One-dimensional translational flange (right, flange axis directed OUT OF cut plane) |
|
| impulseFace |
Type: Flange_b Description: One-dimensional translational flange (right, flange axis directed OUT OF cut plane) |
Components (4)
| lock |
Type: Mass Description: Sliding mass with inertia |
|
|---|---|---|
| impulse |
Type: Mass Description: Sliding mass with inertia |
|
| rightSide |
Type: IdealGearR2T Description: Gearbox transforming rotational into translational motion |
|
| leftSide |
Type: IdealGearR2T Description: Gearbox transforming rotational into translational motion |
Used in Examples (2)
|
IndustryExamples.ConsumerProducts.PendulumClock Main pendulum clock example. Clock has one hand that takes one step each second. The movement is controlled by a counterweight. |
|
|
IndustryExamples.ConsumerProducts.PendulumClock Expanded pendulum clock setup with two hands, the relative motion of the hands are controlled by gear ratios. |