WOLFRAM SYSTEM MODELER
ChainPendulumChain pendulum with four chain links. |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["IntroductoryExamples.CustomComponent.ChainPendulum"]
Out[1]:=
Information
The chain pendulum model is a concatenation of chain links components. In this example, the pendulum consists of four chain links.
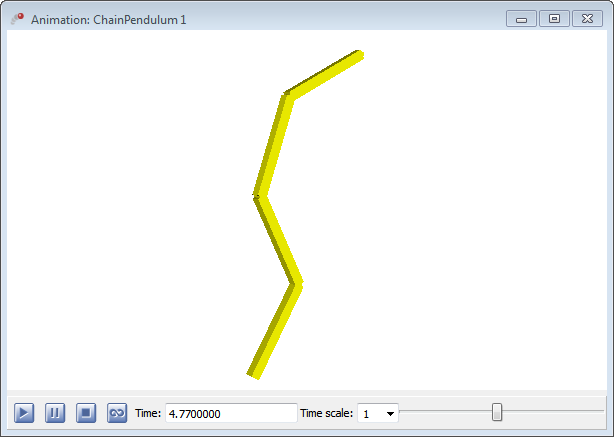
The figure below shows the animation of the pendulum at time 4.77s.
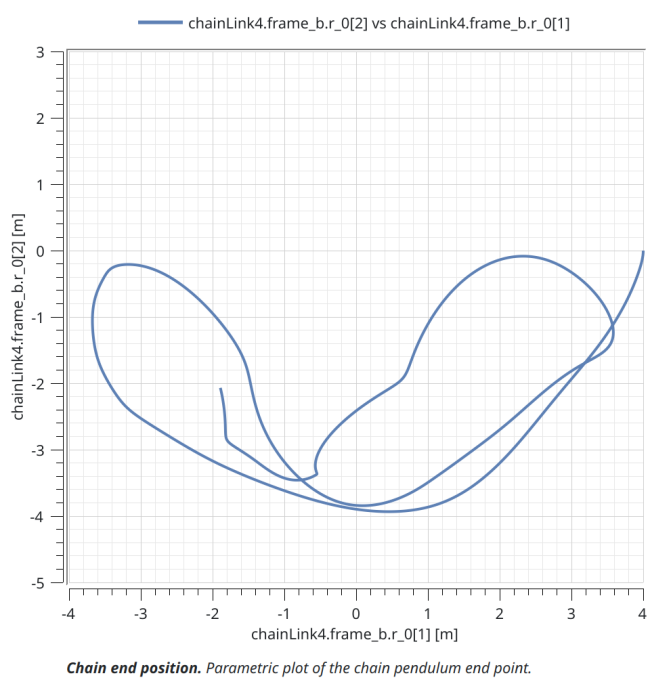
The position of the end of the pendulum is displayed in the following figure.
For a step by step tutorial see Custom Component—Chain Pendulum.
Components (5)
| chainLink1 |
Type: ChainLink Description: Chain link consisting of a rotation and a body box. |
|
|---|---|---|
| chainLink2 |
Type: ChainLink Description: Chain link consisting of a rotation and a body box. |
|
| chainLink3 |
Type: ChainLink Description: Chain link consisting of a rotation and a body box. |
|
| chainLink4 |
Type: ChainLink Description: Chain link consisting of a rotation and a body box. |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |