WOLFRAM SYSTEM MODELER
ChainLinkChain link consisting of a rotation and a body box. |
|
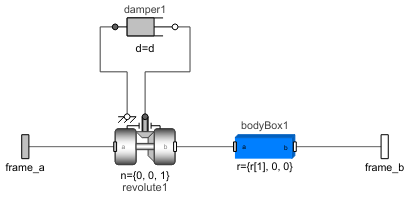
Diagram
Wolfram Language
In[1]:=
SystemModel["IntroductoryExamples.CustomComponent.ChainLink"]
Out[1]:=

Information
The chain link component is created with the help of the Modelica.Mechanics.MultiBody and Modelica.Mechanics.Rotational libraries. The chain link is inspired by the pendulum example in MultiBody library and consists of a body rotating around one end.
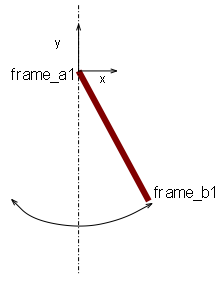
The chain link is modeled by a box body connected to a revolute joint. The rotation friction is represented with a damper. For the model to be used as a component, connectors to both ends of the body are added with the help of the connection line tool. The dimension (length, width, height) of the chain link and the damping coefficient are chosen as parameters to make the component more flexible.
The chain link component is used in the chain pendulum model.
For a step by step tutorial see Custom Component—Chain Pendulum.
Parameters (2)
| r |
Value: {1, 0.1, 0.1} Type: Position[3] (m) Description: Dimension vector of chain link, (length, width, height) |
|---|---|
| d |
Value: 1.0 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Damping constant |
Connectors (2)
Components (3)
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| bodyBox1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| damper1 |
Type: Damper Description: Linear 1D rotational damper |
Used in Examples (1)
|
IntroductoryExamples.CustomComponent Chain pendulum with four chain links. |
Extended by (1)
|
IntroductoryExamples.CustomComponent Chain link with a CAD shape attached. |