WOLFRAM SYSTEM MODELER
ChainLinkCADChain link with a CAD shape attached. |
|
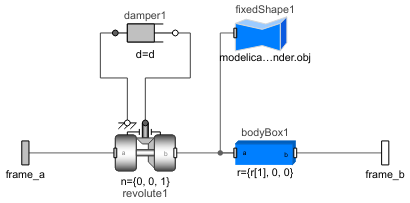
Diagram
Wolfram Language
In[1]:=
SystemModel["IntroductoryExamples.CustomComponent.ChainLinkCAD"]
Out[1]:=

Information
The chain link with a CAD shape is based on the ChainLink component. It is used in the ChainPendulmCAD model.
Parameters (2)
| r |
Value: {1, 0.1, 0.1} Type: Position[3] (m) Description: Dimension vector of chain link, (length, width, height) |
|---|---|
| d |
Value: 1.0 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Damping constant |
Connectors (2)
Components (4)
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| bodyBox1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| damper1 |
Type: Damper Description: Linear 1D rotational damper |
|
| fixedShape1 |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Examples (1)
|
IntroductoryExamples.CustomComponent Chain pendulum with four chain links with CAD shapes attached. |