WOLFRAM SYSTEM MODELER
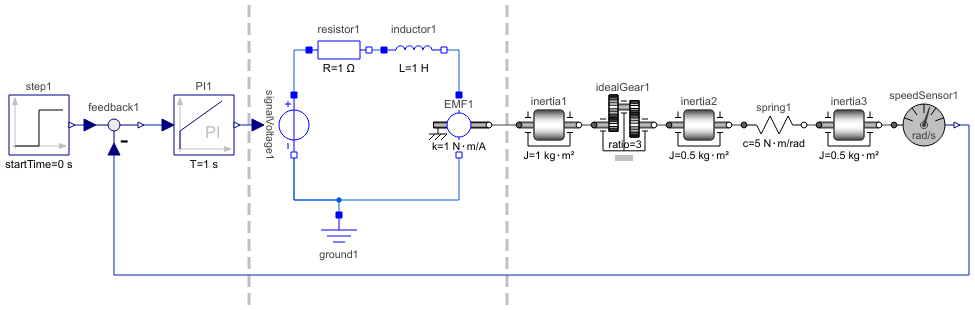
WeakServoMechanismA servo mechanism with a weak axis |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["IntroductoryExamples.MultiDomain.WeakServoMechanism"]
Out[1]:=
Information
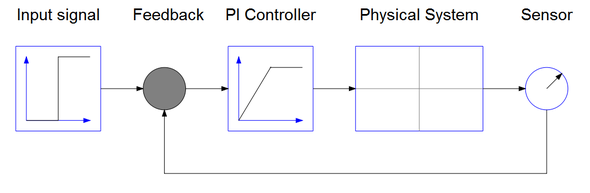
The structure of the control system is shown in the schematic picture below. It consists of an input signal, a sensor, a feedback loop, and a regulator. The physical system consists of the gear and axis system described in DC Motor and Weak Axis. Since the physical system has negative static gain the PI gain also has to be negative.
In the stiff servo mechanism example it is shown how different controller gains affect the response. After selecting a gain k = 1.5 for both the stiff and weak axis systems we can compare the results:
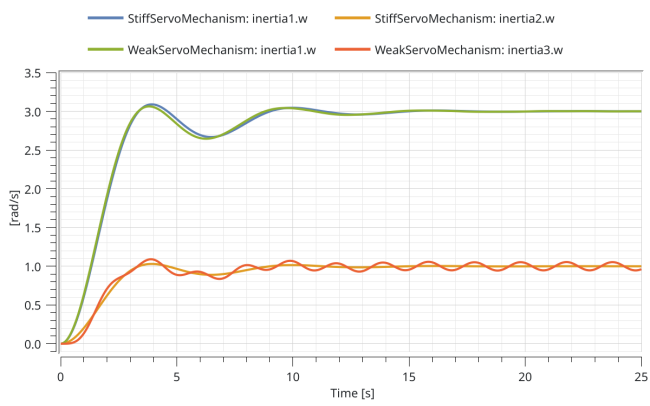
As seen the controller design made using the stiff axis model performs well also when the more accurate weak axis is used in simulations.
For a step by step tutorial see Multidomain—A Servo Mechanism.
Components (14)
| ground1 |
Type: Ground Description: Ground node |
|
|---|---|---|
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| idealGear1 |
Type: IdealGear Description: Ideal gear without inertia |
|
| EMF1 |
Type: RotationalEMF Description: Electromotoric force (electric/mechanic transformer) |
|
| signalVoltage1 |
Type: SignalVoltage Description: Generic voltage source using the input signal as source voltage |
|
| feedback1 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| step1 |
Type: Step Description: Generate step signal of type Real |
|
| resistor1 |
Type: Resistor Description: Ideal linear electrical resistor |
|
| inductor1 |
Type: Inductor Description: Ideal linear electrical inductor |
|
| speedSensor1 |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| spring1 |
Type: Spring Description: Linear 1D rotational spring |
|
| inertia3 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| PI1 |
Type: PI Description: Proportional-Integral controller |