WOLFRAM SYSTEM MODELER
SMR_InverterStarting of synchronous reluctance machine with inverter |
|
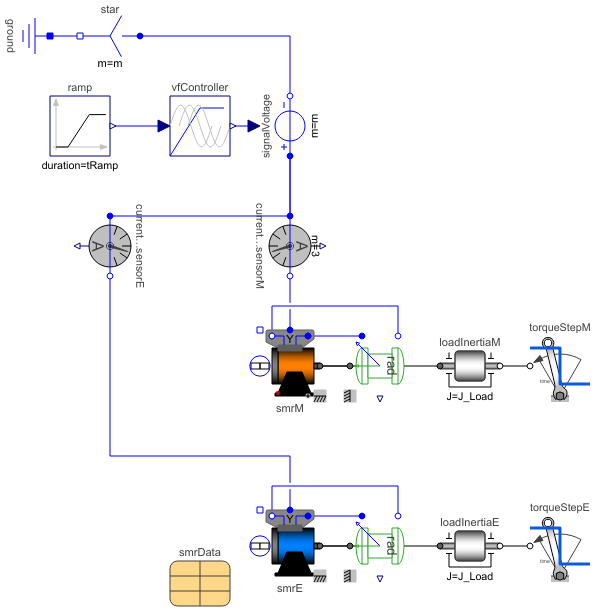
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SynchronousMachines.SMR_Inverter"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Synchronous machine with reluctance rotor fed by an ideal inverter
An ideal frequency inverter is modeled by using a
VfController
and a three-phase SignalVoltage.
Frequency is raised by a ramp, causing the
reluctance machine to start,
and accelerating inertias. At time tStep a load step is applied.
Simulate for 1.5 seconds and plot (versus time):
currentRMSsensorM|E.I: equivalent RMS stator currentsmrM|E.wMechanical: machine speedsmrM|E.tauElectrical: machine torquerotorAngleM|R.rotorDisplacementAngle: rotor displacement angle
Parameters (8)
| VsNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
|---|---|
| fsNominal |
Value: smrData.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| fKnee |
Value: 50 Type: Frequency (Hz) Description: Knee frequency of V/f curve |
| tRamp |
Value: 1 Type: Time (s) Description: Frequency ramp |
| T_Load |
Value: 46 Type: Torque (N⋅m) Description: Nominal load torque |
| tStep |
Value: 1.2 Type: Time (s) Description: Time of load torque step |
| J_Load |
Value: 0.29 Type: Inertia (kg⋅m²) Description: Load inertia |
| smrData |
Type: SM_ReluctanceRotorData Description: Synchronous machine data |
Components (18)
| ground |
Type: Ground Description: Ground node |
|
|---|---|---|
| star |
Type: Star Description: Star-connection |
|
| signalVoltage |
Type: SignalVoltage Description: Polyphase signal voltage source |
|
| ramp |
Type: Ramp Description: Generate ramp signal |
|
| vfController |
Type: VfController Description: Voltage-Frequency controller |
|
| currentRMSsensorM |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| currentRMSsensorE |
Type: CurrentQuasiRMSSensor Description: Length of space phasor -> RMS current |
|
| terminalBoxM |
Type: TerminalBox Description: Terminal box Y/D-connection |
|
| terminalBoxE |
Type: TerminalBox Description: Terminal box Y/D-connection |
|
| smrM |
Type: SM_ReluctanceRotor Description: Reluctance machine with optional damper cage |
|
| smrE |
Type: SM_ReluctanceRotor Description: Synchronous machine with reluctance rotor and damper cage |
|
| rotorAngleM |
Type: RotorDisplacementAngle Description: Rotor lagging angle |
|
| rotorAngleE |
Type: RotorDisplacementAngle Description: Rotor lagging angle |
|
| loadInertiaM |
Type: Inertia Description: 1D-rotational component with inertia |
|
| loadInertiaE |
Type: Inertia Description: 1D-rotational component with inertia |
|
| torqueStepM |
Type: TorqueStep Description: Constant torque, not dependent on speed |
|
| torqueStepE |
Type: TorqueStep Description: Constant torque, not dependent on speed |
|
| smrData |
Type: SM_ReluctanceRotorData Description: Synchronous machine data |