WOLFRAM SYSTEM MODELER
RevoluteConstraintBody attached by one spring and revolute joint or constrained to environment |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Constraints.RevoluteConstraint"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
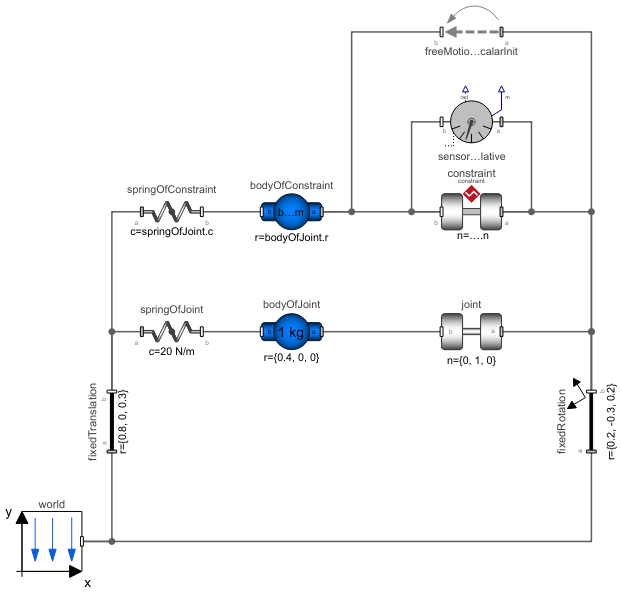
This example demonstrates the functionality of constraint representing revolute joint. Each of two bodies is at one of its end connected by spring to the world. The other end is also connected to the world either by revolute joint or by appropriate constraint. Therefore, the body can only perform rotation about the revolute axis depending on working forces.
Simulation results
After simulating the model, see the animation of the multibody system and compare movement of body connected by joint (blue colored) with movement of that one connected by constraint (of green color). Additionally, the outputs from sensorConstraintRelative depict both position and angle deviations in the constraining element.
Parameters (1)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|
Components (11)
| joint |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| constraint |
Type: Revolute Description: Revolute cut-joint and translational directions may be constrained or released |
|
| sensorConstraintRelative |
Type: RelativeSensor Description: Measure relative kinematic quantities between two frame connectors |
|
| bodyOfJoint |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| bodyOfConstraint |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| springOfJoint |
Type: Spring Description: Linear translational spring with optional mass |
|
| springOfConstraint |
Type: Spring Description: Linear translational spring with optional mass |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| fixedRotation |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| freeMotionScalarInit |
Type: FreeMotionScalarInit Description: Free motion joint with scalar initialization and state selection (6 degrees-of-freedom, 12 potential states) |