WOLFRAM SYSTEM MODELER
DoublePendulumSimple double pendulum with two revolute joints and two bodies |
|
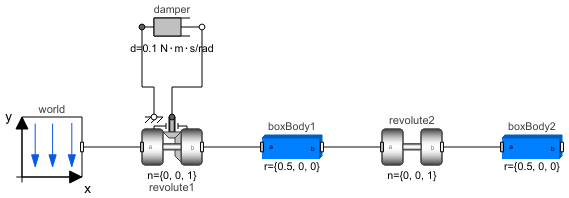
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.DoublePendulum"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
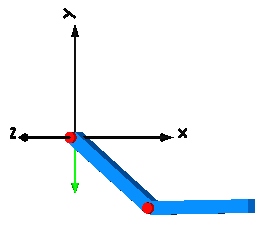
This example demonstrates that by using joint and body elements animation is automatically available. Also the revolute joints are animated. Note, that animation of every component can be switched of by setting the first parameter animation to false or by setting enableAnimation in the world object to false to switch off animation of all components.
Components (6)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| damper |
Type: Damper Description: Linear 1D rotational damper |
|
| boxBody1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| boxBody2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |