WOLFRAM SYSTEM MODELER
LineForceWithTwoMassesDemonstrate line force with two point masses using a JointUPS and alternatively a LineForceWithTwoMasses component |
|
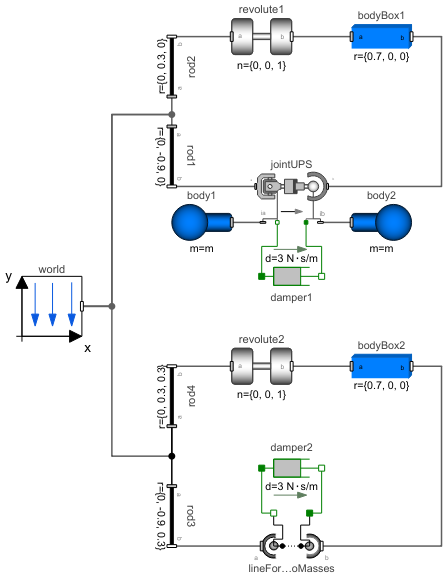
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.LineForceWithTwoMasses"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
It is demonstrated how to implement line force components that shall have mass properties. Two alternative implementations are given:
- With JointUPS:
Modelica.Mechanics.MultiBody.Joints.Assemblies.JointUPS is an aggregation of a universal, a prismatic and a spherical joint that approximates a real force component, such as a hydraulic cylinder. At the two frames of the prismatic joint (frame_ia, frame_ib of jointUPS) two bodies are attached. The parameters are selected such that the center of masses of the two bodies are located on the line connecting frame_a and frame_b of the jointUPS component. Both bodies have the same mass and the inertia tensor is set to zero, i.e., the two bodies are treated as point masses. - With LineForceWithTwoMasses:
Modelica.Mechanics.MultiBody.Forces.LineForceWithTwoMasses is a line force component with the built-in property that two point masses are located on the line on which the line force is acting. The parameters are selected in such a way that the same system as with the jointUPS component is described.
In both cases, a linear 1-dimensional translational damper from the Modelica.Mechanics.Translational library is used as line force between the two attachment points. Simulate this system and plot the differences of the cut forces at both sides of the line force component ("rod_f_diff" and "body_f_diff"). Both vectors should be zero (depending on the chosen relative tolerance of the integration, the difference is in the order of 1e-10 … 1e-15).
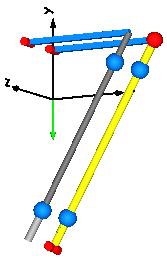
Note, that the implementation with the LineForceWithTwoMasses component is simpler and more convenient. An animation of this simulation is shown in the figure below. The system on the left side in the front is the animation with the LineForceWithTwoMasses component whereas the system on the right side in the back is the animation with the JointUPS component.
Parameters (1)
| m |
Value: 1 Type: Mass (kg) Description: Mass of point masses |
|---|
Components (15)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| bodyBox1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| rod1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| jointUPS |
Type: JointUPS Description: Universal - prismatic - spherical joint aggregation (no constraints, no potential states) |
|
| body1 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| body2 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| rod2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| damper1 |
Type: Damper Description: Linear 1D translational damper |
|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| bodyBox2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| rod3 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| rod4 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| damper2 |
Type: Damper Description: Linear 1D translational damper |
|
| lineForceWithTwoMasses |
Type: LineForceWithTwoMasses Description: General line force component with two optional point masses on the connection line |