WOLFRAM SYSTEM MODELER
PendulumSimple pendulum with one revolute joint and one body |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.Pendulum"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
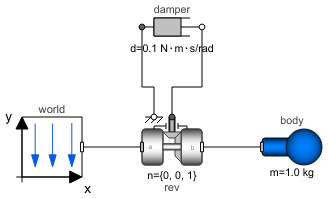
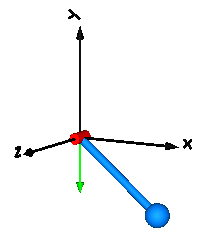
This simple model demonstrates that by just dragging components default animation is defined that shows the structure of the assembled system.
Components (4)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| rev |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| damper |
Type: Damper Description: Linear 1D rotational damper |
|
| body |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |